Центр тяжести
геометрическая точка, неизменно связанная с твёрдым телом, через которую проходит равнодействующая всех сил тяжести, действующих на частицы этого тела при любом положении последнего в пространстве; она может не совпадать ни с одной из точек данного тела (например, у кольца). Если свободное тело подвешивать на нити, прикрепляемые последовательно к разным точкам тела, то направления этих нитей пересекутся в Ц. т. тела. Положение Ц. т. твёрдого тела в однородном поле тяжести совпадает с положением его центра масс (См. Центр масс). Разбивая тело на части с весами p k ,
для которых координаты x k , y k , z k
их Ц. т. известны, можно найти координаты Ц. т. всего тела по формулам:
Большая советская энциклопедия. - М.: Советская энциклопедия . 1969-1978 .
Синонимы :Смотреть что такое "Центр тяжести" в других словарях:
Центр масс (центр инерции, барицентр) в механике это геометрическая точка, характеризующая движение тела или системы частиц как целого. Содержание 1 Определение 2 Центры масс однородных фигур 3 В механике … Википедия
Неизменно связанная с твёрдым телом точка, через которую проходит равнодействующая сил тяжести, действующих на частицы этого тела при любом положении тела в пространстве. У однородного тела, имеющего центр симметрии (круг, шар, куб и т. д.),… … Энциклопедический словарь
Геом. точка, неизменно связанная с твёрдым телом, через к рую проходит равнодействующая сила всех сил тяжести, действующих на частицы тела при любом его положении в пространстве; она может не совпадать ни с одной из точек данного тела (напр., у… … Физическая энциклопедия
Неизменно связанная с твердым телом точка, через которую проходит равнодействующая сил тяжести, действующих на частицы этого тела при любом положении тела в пространстве. У однородного тела, имеющего центр симметрии (круг, шар, куб и т. д.),… … Большой Энциклопедический словарь
Центр тяжести - ЦЕНТР ТЯЖЕСТИ, точка, через которую проходит равнодействующая сил тяжести, действующих на частицы твердого тела при любом положении тела в пространстве. У однородного тела, имеющего центр симметрии (круг, шар, куб и т.д.), центр тяжести находится … Иллюстрированный энциклопедический словарь
ЦЕНТР ТЯЖЕСТИ, точка, в которой сконцентрирован вес тела и вокруг которой его вес распределен и уравновешен. Свободно падающий предмет вращается вокруг своего центра тяжести, в свою очередь вращающийся по траектории, которую описывал бы точечный… … Научно-технический энциклопедический словарь
центр тяжести - твёрдого тела; центр тяжести Центр параллельных сил тяжести, действующих на все частицы тела … Политехнический терминологический толковый словарь
Центроид Словарь русских синонимов. центр тяжести сущ., кол во синонимов: 12 главное (31) дух … Словарь синонимов
ЦЕНТР ТЯЖЕСТИ - человеческого тела не обладает постоянным анат. расположением внутри тела, а перемещается в зависимости от измене ний позы; экскурсии его относительно позвоночника могут достигать 20 25 см. Опытное определение положения Ц. т. всего тела при… … Большая медицинская энциклопедия
Точка приложения равнодействующей сил тяжести (весов) всех отдельных частей (деталей), составляющих данное тело. Если тело симметрично относительно плоскости, прямой или точки, то в первом случае Ц. т. лежит в плоскости симметрии, во втором на… … Технический железнодорожный словарь
центр тяжести - Геометрическая точка твёрдого тела, через которую проходит равнодействующая всех сил тяжести, действующих на частицы этого тела при любом положении его в пространстве [Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя… … Справочник технического переводчика
Книги
- Центр тяжести , Поляринов А.В.. Роман Алексея Поляринова напоминает сложную систему озер. В нем и киберпанк, и величественные конструкции Дэвида Митчелла, и Борхес, и Дэвид Фостер Уоллес… Но его герои – молодые журналист,…
Любое тело можно рассматривать как совокупность материальных точек, в качестве которых можно, например, брать молекулы. Пусть тело состоит из n материальных точек с массами m1, m2, ...mn.
Центром масс тела , состоящего из n материальных точек, называется точка (в геометрическом смысле), радиус-вектор которой определяется формулой :
Здесь R1 – радиус-вектор точки с номером i (i = 1, 2, ... n).
Это определение выглядит непривычно, но на самом деле оно даёт положение того самого центра масс, о котором у нас имеется интуитивное представление. Например, центр масс стержня будет находиться в его середине. Сумма масс всех точек, входящая в знаменатель вышеопределённой формулы, называется массой тела. Массой тела называется сумма масс всех его точек : m = m1 + m2 + ... + mn .

В симметричных однородных телах ЦМ всегда расположен в центре симметрии или лежит на оси симметрии, если у фигуры центра симметрии нет. Центр масс может находиться как внутри тела (диск, квадрат, треугольник), так и вне его (кольцо, рамка, угольник).
Для человека положение ЦМ зависит от принятой позы. Во многих видах спорта важным слагаемым успеха является способность сохранять равновесие. Так, в спортивной гимнастике, акробатике
большое количество элементов включат в себя разные виды равновесия. Важна способность сохранять равновесие в фигурном катании, в беге на коньках, где опора имеет очень малую площадь.
Условиями равновесия покоящегося тела являются одновременное равенство нулю суммы сил и суммы моментов сил , действующих на тело.
Выясним, какое положение должна занимать ось вращения, чтобы закреплённое на ней тело оставалось в равновесии под действием сил тяжести. Для этого разобьём тело на множество маленьких кусочков и нарисуем действующие на них силы тяжести.

В соответствии с правилом моментов для равновесия необходимо, чтобы сумма моментов всех этих сил относительно оси равнялась нулю.
Можно показать, что для каждого тела существует единственная точка, где сумма моментов сил тяжести относительно любой оси, проходящей через эту точку, равна нулю. Эта точка называется центром тяжести (обычно совпадает с центром масс).
Центром тяжести тела (ЦТ) называется точка, относительно которой сумма моментов сил тяжести, действующей на все частицы тела, равна нулю .
Таким образом, силы тяжести не вызывают вращения тела вокруг центра тяжести. Поэтому все силы тяжести можно было бы заменить единственной силой, которая приложена к этой точке и равна силе тяжести.
Для изучения движений тела спортсмена часто вводится термин общий центр тяжести (ОЦТ). Основные свойства центра тяжести:
Если тело закреплено на оси, проходящей через центр тяжести, то сила тяжести не будет вызывать его вращения;
Центр тяжести является точкой приложения силы тяжести;
В однородном поле центр тяжести совпадает с центром масс.
Равновесным называется такое положение тела, при котором оно может оставаться в покое сколь угодно долго. При отклонении тела от положения равновесия, силы, действующие на него, изменяются, и равновесие сил нарушается.
Существуют различные виды равновесия (рис. 9). Принято различать три вида равновесия: устойчивое, неустойчивое и безразличное.
Устойчивое равновесие (рис. 9, а) характеризуется тем, что тело возвращается в первоначальное положение при его отклонении. В таком случае возникают силы, или моменты сил, стремящаяся возвратить тело в исходное положение. Примером может служить положение тела с верхней опорой (например, вис на перекладине), когда при любых отклонениях тело стремится возвратиться в начальное положение.
Безразличное равновесие (рис. 9, б) характеризуется тем, что при изменении положения тела не возникает сил или моментов сил, стремящихся возвратить тело в начальное положение или ещё более удалить тело от него. Это редко наблюдаемый у человека случай. Примером может служить состояние невесомости на космическом корабле.
Неустойчивое равновесие (рис. 9, в) наблюдается тогда, когда при малых отклонениях тела возникают силы или моменты сил, стремящихся ещё больше отклонить тело от начального положения. Такой случай можно наблюдать, когда человек, стоя на опоре очень малой площади (значительно меньшей площади его двух ног или даже одной ноги), отклоняется в сторону.
Рисунок 9. Равновесие тела : устойчивое (а), безразличное (б), неустойчивое (в)

Наряду с перечисленными видами равновесия тел в биомеханике рассматривают ещё один вид равновесия – ограниченно-устойчивое. Этот вид равновесия отличается тем, что тело может вернуться в начальное положение при отклонении от него до некоторого предела, например, определяемого границей площади опоры. Если же отклонение переходит этот предел, равновесие становится неустойчивым.
Основная задача при обеспечении равновесия тела человека состоит в том, чтобы проекция ОЦМ тела находилась в пределах площади опоры. В зависимости от вида деятельности (сохранение статического положения, ходьба, бег и т. п.) и требований к устойчивости частота и быстрота корригирующих воздействий изменяются, но процессы сохранения равновесия одинаковы.
Распределение массы в теле человека
Масса тела и массы отдельных сегментов очень важны для различных аспектов биомеханики. Во многих видах спорта необходимо знать распределение массы для выработки правильной техники выполнения упражнений. Для анализа движений тела человека используется метод сегментирования: оно условно рассекается на определённые сегменты. Для каждого сегмента определяются его масса и положение центра масс. В табл. 1 определены массы частей тела в относительных единицах.
Таблица 1. Массы частей тела в относительных единицах
Часто вместо понятия центра масс используют другое понятие – центр тяжести. В однородном поле тяжести центр тяжести всегда совпадает с центром масс. Положение центра тяжести звена указывают как его расстояние от оси проксимального сустава и выражают относительно длины звена, принятой за единицу.
В табл. 2 приведены анатомическое положение центров тяжести различных звеньев тела.
Таблица 2. Центры тяжести частей тела
| Часть тела | Положение центра тяжести |
| Бедро | 0,44 длины звена |
| Голень | 0,42 длины звена |
| Плечо | 0,47 длины звена |
| Предплечье | 0,42 длины звена |
| Туловище | |
| Голова | |
| Кисть | |
| Стопа | |
| Плечо | 0,47 длины звена |
| Предплечье | 0,42 длины звена |
| Туловище | 0,44 расстояния от поперечной оси плечевых суставов до оси тазобедренных |
| Голова | Расположена в области турецкого седла клиновидной кости (проекция спереди между бровями, сбоку – на 3,0 – 3,5 выше наружного слухового прохода) |
| Кисть | В области головки третьей пястной кости |
| Стопа | На прямой, соединяющей пяточный бугор пяточной кости с концом второго пальца на расстоянии 0,44 от первой точки |
| Общий центр масс тяжести при вертикальном положении тела | Расположен при основной стойке в области малого таза, впереди крестца |
Центром тяжести твердого тела называется геометрическая точка, жестко связанная с этим телом, и являющаяся центром параллельных сил тяжести, приложенных к отдельным элементарным частицам тела (рисунок 1.6).
Радиус-вектор этой точки

Рисунок 1.6
Для однородного тела положение центра тяжести тела не зависит от материала, а определяется геометрической формой тела.
Если удельный вес однородного тела γ , вес элементарной частицы тела
P k = γΔV k (P = γV ) подставить в формулу для определения r C , имеем
Откуда, проецируя на оси и переходя к пределу, получаем координаты центра тяжести однородного объема

Аналогично для координат центра тяжести однородной поверхности площадью S (рисунок 1.7, а)


Рисунок 1.7
Для координат центра тяжести однородной линии длиной L (рисунок 1.7, б)

Способы определения координат центра тяжести
Исходя из полученных ранее общих формул, можно указать способы определения координат центров тяжести твердых тел:
1 Аналитический (путем интегрирования).
2 Метод симметрии . Если тело имеет плоскость, ось или центр симметрии, то его центр тяжести лежит соответственно в плоскости симметрии, оси симметрии или в центре симметрии.
3 Экспериментальный (метод подвешивания тела).
4 Разбиение . Тело разбивается на конечное число частей, для каждой из которых положение центра тяжести C и площадь S известны. Например, проекцию тела на плоскость xOy (рисунок 1.8) можно представить в виде двух плоских фигур с площадями S 1 и S 2 (S = S 1 + S 2 ). Центры тяжести этих фигур находятся в точках C 1 (x 1 , y 1 ) и C 2 (x 2 , y 2 ) . Тогда координаты центра тяжести тела равны


Рисунок 1.8
5Дополнение (метод отрицательных площадей или объемов). Частный случай способа разбиения. Он применяется к телам, имеющим вырезы, если центры тяжести тела без выреза и вырезанной части известны. Например, необходимо найти координаты центра тяжести плоской фигуры (рисунок 1.9):


Рисунок 1.9
Центры тяжести простейших фигур
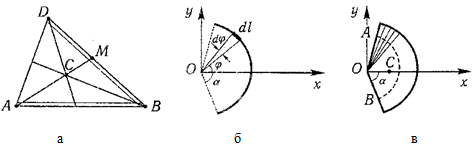
Рисунок 1.10
1 Треугольник
Центр тяжести площади треугольник совпадает с точкой пересечения его медиан (рисунок 1.10, а).
DM = MB , CM = (1/3)AM .
2 Дуга окружности
Дуга имеет ось симметрии (рисунок 1.10, б). Центр тяжести лежит на этой оси, т.е. y C = 0 .

dl – элемент дуги, dl = Rdφ , R – радиус окружности, x = Rcosφ , L = 2αR ,
Следовательно:
x C = R(sinα/α) .
3 Круговой сектор
Сектор радиуса R с центральным углом 2α имеет ось симметрии Ox , на которой находится центр тяжести (рисунок 1.10, в).
Разбиваем сектор на элементарные секторы, которые можно считать треугольниками. Центры тяжести элементарных секторов располагаются на дуге окружности радиуса (2/3)R .
Центр тяжести сектора совпадает с центром тяжести дуги AB :
14. Способы задания движения точки.
При векторном способе задания движения положение точки определяется радиус-вектором, проведенным из неподвижной точки в выбранной системе отсчета.
При координатном способе задания движения задаются координаты точки как функции времени:

Это параметрические уравнения траектории движущейся точки, в которых роль параметра играет время t . Чтобы записать ее уравнение в явной форме, надо исключить из них t .
При естественном способе задания движения задаются траектория точки, начало отсчета на траектории с указанием положительного направления отсчета, закон изменения дуговой координаты: s=s(t) . Этим способом удобно пользоваться, если траектория точки заранее известна.
15. 1.2 Скорость точки
Рассмотрим перемещение точки за малый промежуток времени Δt :
![]()
средняя скорость точки за промежуток времени Dt . Скорость точки в данный момент времени


Скорость точки – это кинематическая мера ее движения, равная производной по времени от радиус-вектора этой точки в рассматриваемой системе отсчета. Вектор скорости направлен по касательной к траектории точки в сторону движения.
Просмотр: эта статья прочитана 11269 раз
Pdf Выберите язык... Русский Украинский Английский
Краткий обзор
Полностью материал скачивается выше, предварительно выбрав язык
Обзор
Рычаг - это твердое тело, имеющее недвижимую ось вращения и находящееся под действием сил, лежащих в плоскости, перпендикулярной этой оси.
Если рычаг находится в состоянии покоя, то алгебраическая сумма моментов всех сил, приложенных к рычагу относительно опорной точки, равняется нулю
Произвольная плоская система сил - это система сил, линии действия которых расположены в плоскости независимо.
Методом Пуансо в центре приведения О будет получена система сил и система пар, моменты каждой из которых равняют моментам соответствующей силы относительно центра приведения.
Главным вектором системы называется вектор, который равняется геометрической сумме всех сил системы.
Главным моментом системы относительно центра О в плоскости называется алгебраическая сумма моментов сил системы относительно центра приведения О.
Главный вектор не зависит от выбора центра приведения О. Главный момент сил зависит от центра приведения.
Основная теорема статики о приведении системы сил к данному центру : Какая-либо плоская произвольная система сил, действующих на абсолютно твердое тело, при приведении к произвольно избранному центру О, может быть заменена одной силой, равняющейся главному вектору системы и приложенной в центре приведения О, и одной парой с моментом, равняющемуся главному моменту системы относительно центра О.
Рассмотрены случаи приведения плоской системы сил к более простому виду
Условия равновесия произвольной плоской системы сил.
1. Геометрические условия равновесия : для равновесия плоской произвольной системы сил необходимо и достаточно, чтобы главный вектор и главный момент системы равнялись нулю
2. Аналитические условия равновесия .
Основная форма условий равновесия : Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы проекций всех сил на координатные оси и сумма их моментов относительно любого центра, который лежит в плоскости действия сил, равнялись нулю.
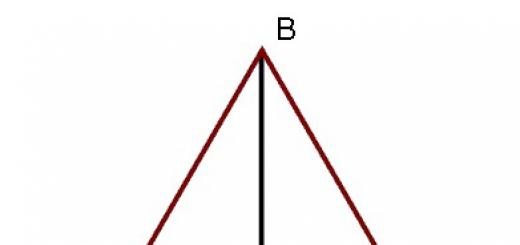
Вторая форма условий равновесия : Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов всех сил относительно любых двух центров А и В и сумма их проекций на ось, не перпендикулярную прямой АВ, равнялись нулю.
Третья форма условий равновесия (уравнение трех моментов) : Для равновесия плоской произвольной системы сил необходимо и достаточно, чтобы суммы моментов всех сил относительно любых трех центров А, В и С, не лежащих на одной прямой, равнялись нулю.
Центр параллельных сил
Система параллельных сил, направленных в одну сторону, не может быть уравновешена или приводиться к паре сил, она всегда имеет равнодействующую.
Линия действия равнодействующей параллельна силам. Положение точки ее приложение зависит от величин и положения точек приложения сил системы.
Центр параллельных сил
- точка С точка приложения равнодействующей системы параллельных сил.
Положение центра параллельных сил - точки С, определяется координатами этой точки
Центр тяжести твердого тела и его координаты
Центр тяжести тела - неизменно связанная с этим телом геометрическая точка, в которой приложена равнодействующая сил тяжести отдельных частиц тела, т.е. вес тела в пространстве.
Координаты центра тяжести определяются аналогично координатам центра параллельных сил С (), составленных силами тяжести частиц тела.
Положение центра тяжести однородного тела зависит только от его геометрической формы и размеров, и не зависит от свойств материала, из которого тело выполнено.
Сумма произведений элементарных площадей, входящих в состав плоской фигуры, на алгебраические значения их расстояний до некоторой оси, называется статическим моментом площади плоской фигуры.
Статический момент
площади плоской фигуры равняется произведению площади фигуры на алгебраическое расстояние от центра тяжести до этой оси. Единица измерения статического момента [см3].
статический момент площади плоской фигуры относительно оси, которая проходит через центр тяжести фигуры, равняется нулю.
Вес тела это равнодействующая сил тяжести отдельных частиц тела.
Способы определения положения центра тяжести .
- Метод симметрии : Если однородное тело имеет плоскость, ось или центр симметрии, то центр тяжести лежит соответственно или в плоскости симметрии, или на оси симметрии, или в центре симметрии.Центр тяжести линии длиной - по середине. Центр тяжести окружности (или круга) радиуса - в его центре, т.е. в точке пересечения диаметров. Центр тяжести параллелограмма, ромба или параллелепипеда - в точке пересечения диагоналей. Центр тяжести правильного многоугольника - в центре вписанного или описанный круга.
- Метод разбивки : Если тело можно разбить на конечное количество элементов (объемов, плоскостей, линий), для каждой из которых положение центра тяжести известно, то координаты центра тяжести всего тела можно определить зная значения для элементов непосредственно по формулам
- Метод дополнения (отрицательных плоскостей): Если тело имеет вырезанные элементы, то при разбивке на элементы, вырезанная часть (площадь, объем) отнимаются из общей, т.е. вырезанным элементам даются отрицательные значения площади или объема
Формат: pdf
Размер: 700 КВ
Язык: русский, украинский
Пример расчета прямозубой цилиндрической передачи
Пример расчета прямозубой цилиндрической передачи. Выполнен выбор материала, расчет допускаемых напряжений, расчет на контактную и изгибную прочность.
Пример решения задачи на изгиб балки
В примере построены эпюры поперечных сил и изгибающих моментов, найдено опасное сечение и подобран двутавр. В задаче проанализировано построение эпюр с помощью дифференциальных зависимостей, провелен сравнительный анализ различных поперечных сечений балки.
Пример решения задачи на кручение вала
Задача состоит в проверке прочности стального вала при заданном диаметре, материале и допускаемых напряжениях. В ходе решения строятся эпюры крутящих моментов, касательных напряжений и углов закручивания. Собственный вес вала не учитывается
Пример решения задачи на растяжение-сжатие стержня
Задача состоит в проверке прочности стального стержня при заданных допускаемых напряжениях. В ходе решения строятся эпюры продольных сил, нормальных напряжений и перемещений. Собственный вес стержня не учитывается
Применение теоремы о сохранении кинетической энергии
Пример решения задачи на применение теоремы о сохранение кинетической энергии механической системы
Определение скорости и ускорения точки по заданным уравнениям движения
Пример решение задачи на определение скорости и ускорения точки по заданным уравнениям движения
Определение скоростей и ускорений точек твердого тела при плоскопараллельном движении
Пример решения задачи на определение скоростей и ускорений точек твердого тела при плоскопараллельном движении
Тема относительно проста для усвоения, однако крайне важна при изучении курса сопротивления материалов. Главное внимание здесь необходимо обратить на решение задач как с плоскими и геометрическими фигурами, так и со стандартными прокатными профилями.
Вопросы для самоконтроля
1. Что такое центр параллельных сил?
Центр параллельных сил есть точка, через которую проходит линия равнодействующей системы параллельных сил, приложенных в заданных точках, при любом изменении направления этих сил в пространстве.
2. Как найти координаты центра параллельных сил?
Для определения координат центра параллельных сил воспользуемся теоремой Вариньона.
Относительно оси x
M x (R) = ΣM x (F k) , - y C R = Σy kFk и y C = Σy kFk /Σ Fk .
Относительно оси y
M y (R) = ΣM y (F k) , - x C R = Σx kFk и x C = Σx kFk /Σ Fk .
Чтобы определить координату z C , повернем все силы на 90° так, чтобы они стали параллельны оси y (рисунок 1.5, б). Тогда
M z (R) = ΣM z (F k) , - z C R = Σz kFk и z C = Σz kFk /Σ Fk .
Следовательно, формула для определения радиус-вектора центра параллельных сил принимает вид
r C = Σr kFk /Σ Fk .
3. Что такое центр тяжести тела?
Центр Тяжести- неизменно связанная с твердым телом точка, через которую проходит равнодействующая сил тяжести, действующих на частицы этого тела при любом положении тела в пространстве. У однородного тела, имеющего центр симметрии (круг, шар, куб и т. д.), центр тяжести находится в центре симметрии тела. Положение центра тяжести твердого тела совпадает с положением его центра масс.
4. Как найти центр тяжести прямоугольника, треугольника, круга?
Для нахождения центра тяжести треугольника, необходимо нарисовать треугольник – фигуру, состоящую из трех отрезков, соединенных между собой в трех точках. Перед тем, как найти центр тяжести фигуры, необходимо, используя линейку, измерить длину одной стороны треугольника. В середине стороны поставьте отметку, после чего противоположную вершину и середину отрезка соедините линией, которая называется медианой. Тот же самый алгоритм повторите со второй стороной треугольника, а затем и с третьей. Результатом вашей работы станут три медианы, которые пересекаются в одной точке, которая будет являться центром тяжести треугольника. Если необходимо определить центр тяжести круглого диска однородной структуры, то для начала найдите точку пересечения диаметров круга. Она и будет центром тяжести данного тела. Рассматривая такие фигуры, как шар, обруч и однородный прямоугольный параллелепипед, можно с уверенностью сказать, что центр тяжести обруча будет находиться в центре фигуры, но вне ее точек, центр тяжести шара - геометрический центр сферы, и в последнем случае, центром тяжестью считается пересечение диагоналей прямоугольногопараллелепипеда.
5. Как найти координаты центра тяжести плоского составного сечения?
Метод разбиения: если плоскую фигуру можно разбить на конечное число таких частей, для каждой из которых положение центра тяжести известно, то координаты центра тяжести всей фигуры опредляются по формулам:
Х C = ( s k x k) / S; Y C = ( s k y k) / S,
где x k , y k - координаты центров тяжести частей фигуры;
s k - их площади;
S = s k - площадь всей фигуры.
6. Центр тяжести



1. В каком случае для определения центра тяжести достаточно определить одну координату расчетным путем?
В первом случае для определения центра тяжести достаточно определить одну координату Тело разбивается на конечное число частей, для каждой из которых положение центра тяжести C и площадь S известны. Например, проекцию тела на плоскость xOy (рисунок 1.) можно представить в виде двух плоских фигур с площадями S 1 и S 2 (S = S 1 + S 2 ). Центры тяжести этих фигур находятся в точках C 1 (x 1 , y 1) и C 2 (x 2 , y 2) . Тогда координаты центра тяжести тела равны

Так как центры фигур лежат на оси ординат (х = 0), то находим только координату Ус .
2 Как учитывается площадь отверстия в фигуре 4 в формуле для определения центра тяжести фигуры?
Метод отрицательных масс
Этот метод заключается в том, что тело, имеющее свободные полости, считают сплошным, а массу свободных полостей – отрицательной. Вид формул для определения координат центра тяжести тела при этом не меняется.
Таким образом, при определении центра тяжести тела, имеющего свободные полости, следует применять метод разбиения, но считать массу полостей отрицательной.
иметь представление о центре параллельных сил и его свойствах;
знать формулы для определения координат центра тяжести плоских фигур;
уметь определять координаты центра тяжести плоских фигур простых геометрических фигур и стандартных прокатных профилей.
ЭЛЕМЕНТЫ КИНЕМАТИКИ И ДИНАМИКИ
Изучив кинематику точки, обратите внимание на то, что прямолинейное движение точки как неравномерное, так и равномерное всегда характеризуется наличием нормального (центростремительного) ускорения. При поступательном движении тела (характеризуемом движением любой его точки) применимы все формулы кинематики точки. Формулы для определения угловых величин тела, вращающегося вокруг неподвижной оси, имеют полную смысловую аналогию с формулами для определения соответствующих линейных величин поступательно движущегося тела.
Тема 1.7. Кинематика точки
При изучении темы обратите внимание на основные понятия кинематики: ускорение, скорость, путь, расстояние.
Вопросы для самоконтроля
1. В чем заключается относительность понятий покоя и движения?
Механическое движение -это изменение движения тела, или (его частей) в пространстве относительно др. тел с течением времени. Полет брошенного камня, вращение колеса- примеры механического движения.
2. Дайте определение основных понятий кинематики: траектории, расстоянию, пути, скорости, ускорению, времени.
Скорость – это кинематическая мера движения точки, характеризующая быстроту изменения ее положения в пространстве. Скорость является векторной величиной, т. е. она характеризуется не только модулем (скалярной составляющей), но и направлением в пространстве.
Как известно из физики, при равномерном движении скорость может быть определена длиной пути, пройденного за единицу времени: v = s/t = const (предполагается, что начало отсчета пути и времени совпадают). При прямолинейном движении скорость постоянна и по модулю, и по направлению, а ее вектор совпадает с траекторией.
Единица скорости в системе СИ определяется соотношением длина/время, т. е. м/с.
Ускорение есть кинематическая мера изменения скорости точки во времени. Другими словами - ускорение - это скорость изменения скорости.
Как и скорость, ускорение является величиной векторной, т. е. характеризуется не только модулем, но и направлением в пространстве.
При прямолинейном движении вектор скорости всегда совпадает с траекторией и поэтому вектор изменения скорости тоже совпадает с траекторией.
Из курса физики известно, что ускорение представляет собой изменение скорости в единицу времени. Если за небольшой промежуток времени Δt скорость точки изменилась на Δv, то среднее ускорение за данный промежуток времени составило: а ср = Δv/Δt.
Среднее ускорение не дает представление об истинной величине изменения скорости в каждый момент времени. При этом очевидно, что чем меньше рассматриваемый промежуток времени, во время которого произошло изменение скорости, тем ближе значение ускорения будет к истинному (мгновенному).
Отсюда определение: истинное (мгновенное) ускорение есть предел, к которому стремится среднее ускорение при Δt, стремящемся к нулю:
а = lim а ср при t→0 или lim Δv/Δt = dv/dt.
Учитывая, что v = ds/dt, получим: а = dv/dt = d 2 s/dt 2 .
Истинное ускорение в прямолинейном движении равно первой производной скорости или второй производной координаты (расстояния от начала отсчета перемещения) по времени. Единица ускорения - метр, деленный на секунду в квадрате (м/с 2).
Траектория
- линия в пространстве, вдоль которой движется материальная точка.
Путь
- это длина траектории. Пройденный путь l равен длине дуги траектории, пройденной телом за некоторое время t. Путь – скалярная величина.
Расстояние определяет положение точки на ее траектории и отсчитывается от некоторого начала отсчета. Расстояние является алгебраической величиной, так как в зависимости от положения точки относительно начала отсчета и от принятого направления оси расстояний оно может быть и положительным, и отрицательным. В отличие от расстояния путь, пройденный точкой, всегда определяется положительным числом. Путь совпадает с абсолютным значением расстояния только в том случае, когда движение точки начинается от начала отсчета и совершается по траектории в одном направлении.
В общем случае движения точки путь равен сумме абсолютных значений пройденных точкой расстояний за данный промежуток времени:
3. Какими способами может быть задан закон движения точки?
1.Естественный способ задания движения точки.
При естественном способе задания движения предполагается определение параметров движения точки в подвижной системе отсчета, начало которой совпадает с движущейся точкой, а осями служат касательная, нормаль и бинормаль к траектории движения точки в каждом ее положении. Чтобы задать закон движения точки естественным способом необходимо:
1) знать траекторию движения;
2) установить начало отсчета на этой кривой;
3) установить положительное направление движения;
4) дать закон движения точки по этой кривой, т.е. выразить расстояние от начала отсчета до положения точки на кривой в данный момент времени ∪OM=S(t) .
2.Векторный способ задания движения точки
В этом случае положение точки на плоскости или в пространстве определяется вектором-функцией. Этот вектор откладывается от неподвижной точки, выбранной за начало отсчета, его конец определяет положение движущейся точки.
3.Координатный способ задания движения точки
В выбранной системе координат задаются координаты движущейся точки как функции от времени. В прямоугольной декартовой системе координат это будут уравнения:
4. Как направлен вектор истинной скорости точки при криволинейном движении?
При неравномерном движении точки модуль ее скорости с течением времени меняется.
Представим себе точку, движение которой задано естественным способом уравнением s = f(t).
Если за небольшой промежуток времени Δt точка прошла путь Δs, то ее средняя скорость равна:
vср = Δs/Δt.
Средняя скорость не дает представления об истинной скорости в каждый данный момент времени (истинную скорость иначе называют мгновенной). Очевидно, что чем меньше промежуток времени, за который определяется средняя скорость, тем ближе ее значение будет к мгновенной скорости.
Истинная (мгновенная) скорость есть предел, к которому стремится средняя скорость при Δt, стремящемся к нулю:
v = lim v ср при t→0 или v = lim (Δs/Δt) = ds/dt.
Таким образом, числовое значение истинной скорости равно v = ds/dt.
Истинная (мгновенная) скорость при любом движении точки равна первой производной координаты (т. е. расстояния от начала отсчета перемещения) по времени.
При Δt стремящемся к нулю, Δs тоже стремится к нулю, и, как мы уже выяснили, вектор скорости будет направлен по касательной (т. е. совпадает с вектором истинной скорости v). Из этого следует, что предел вектора условной скорости v п, равный пределу отношения вектора перемещения точки к бесконечно малому промежутку времени, равен вектору истинной скорости точки.
5. Как направлены касательное и нормальное ускорения точки?
Направление вектора ускорения совпадает с направлением изменения скорости Δ = - 0
Касательное ускорение в данной точке направлено по касательной к траектории движения точки; если движение ускоренное, то направление вектора касательного ускорения совпадает с направлением вектора скорости; если движение замедленное – то направление вектора касательного ускорения противоположно направлению вектора скорости.
6. Какое движение совершает точка, если касательное ускорение равно нулю, а нормальное не изменяется с течением времени?
Равномерное криволинейное движение характеризуется тем, что численное значение скорости постоянно (v = const ), скорость меняется лишь по направлению. В этом случае касательное ускорение равно нулю, так как v = const (рис.б),
![]()
а нормальное ускорение не равно нулю, так как r - конечная величина.
7. Как выглядят кинематические графики при равномерном и равнопеременном движении?
При равномерном движении тело за любые равные промежутки времени проходит равные пути. Для кинематического описания равномерного прямолинейного движения координатную ось OX удобно расположить по линии движения. Положение тела при равномерном движении определяется заданием одной координаты x . Вектор перемещения и вектор скорости всегда направлены параллельно координатной оси OX . Поэтому перемещение и скорость при прямолинейном движении можно спроецировать на ось OX и рассматривать их проекции как алгебраические величины.
При равномерном движении путь изменяется, согласно линейной зависимости . В координатах . Графиком является наклонная линия.

В результате изучения темы студент должен:
иметь представление о пространстве, времени, траектории; средней и истиной скорости;
знать способы задания движения точки; параметры движения точки по заданной траектории.