нальности (∂ f ∂ ϕ ) 2 . Отсюда видно, что коэффициент инерции объекта зави-
сит от выбора обобщенной координаты и может быть пересчитан.
КЭ нестационарной голономной одностепенной системы имеет струк-
туру квадратного полинома относительно обобщенной скорости q & , коэффи-
циенты которой в общем случае зависят от q и t :
2T = aq & 2 + 2a 1 q & + 2a 0 , при a = a (q ,t ), a 1 = a 1 (q ,t ), a 0 = a 0 (q ,t ) (5.10)
Размерность коэффициентов a , a 0 ,a 1 определяем по принципу Л.Эйлера: все слагаемые в выражениях должны иметь одинаковую размерность.
5.3. Мощность силы
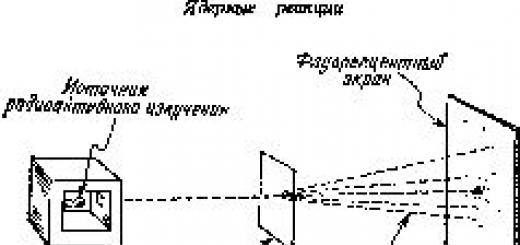
Область пространства, в которой к материальному объекту приложена сила, называется векторным силовым полем . Эта область может быть трехмерной (например-шаровой), либо двумерной, либо представлять отрезок прямой или кривой линии. Обычно считают, что сила зависит только от координат (x , y , z ) точки приложения силы, либо - от одной или двух координат, либо – постоянная по модулю и направлению. Допускаются также случаи, когда силы зависят и от скорости точки и от времени, т.е. сила задана в области пространства координат, скоростей, времени. Встречаются случаи, ко-
гда сила зависит от ускорения. |
||||||||||||||||||||||||||
в мгновение t в системе отсчета Oxyz называется |
||||||||||||||||||||||||||
Мощностью силы F |
||||||||||||||||||||||||||
скаляр, равный скалярному произведению силы |
на скорость точки прило- |
|||||||||||||||||||||||||
жения силы v в этой системе: |
м/c=Вт) |
|||||||||||||||||||||||||
Fv cos(F ,v ) |
||||||||||||||||||||||||||
Zz, (Н |
||||||||||||||||||||||||||
Согласно данному определению мощность силы есть положительный скаляр, если угол между силой и скоростью острый (в этом случае сила способствует движению, нарастанию кинетической энергии) и отрицательна, если угол тупой.(когда сила замедляет движение). Мощность силы равна нулю, если сила перпендикулярна к скорости точки приложения силы, или в случае, если точка приложения силы не имеет скорости.
Мощности в двух системах отсчета различны в случае, если системы движутся одна относительно другой, поэтому следует указывать систему отсчета, в которой вычисляется мощность сил.
Мощность сил трения, также как и других диссипативных сил, направленных против движения, отрицательна.
Мощность силы сцепления колеса с дорогой (если нет проскальзывания колеса) равна нулю, поскольку точка приложения силы не имеет скорости.
Рассмотрим случай, когда силы зависят только от положения точки при-
U (x , y , z ) - функция положения точки приложения силы, т.е. – функция декартовых (или обобщенных) координат. В этом случае силу F (x , y , z ) называют потенциальной , а “силовую функцию” U с обратным знаком, называют

потенциальной энергией : П (x , y , z ) = − U (x , y , z ) . Область пространства, в ко-
торой на тело действует потенциальная сила, называется потенциальным силовым полем . Под знаком производной можно добовлять любую константу, поэтому силовая функция и потенциальная энергия определяется с точностью до константы, определяющей уровень отсчета. В общем случае, потенциальную энергию можно определить как функцию П (q 1 ,..., q n ) , получаемую
путем преобразования мощности к виду: P = − П & (q 1 ,..., q n ) , где q s – обобщен-
ные координаты.
Пусть тело произвольно движется в пространстве, т.е. оно перемещается вместе с полюсом O со скоростью v O и вращается с угловой скоростью ω .
Мощность пары сил, приложенной к твердому телу, не зависит от скорости полюса. Она равна скалярному произведению момента пары сил и угловой скорости.
P = M |
M ω cos(M ,ω |
) = M xω x + M yω y + M zω z , |
|||||
где M - момент пары сил, ω - угловая скорость твердого тела, которая, как известно, не зависит от выбора полюса. Мощность диссипативных пар сил отрицательна. Мощность пары сил не зависит от места приложения её к телу. Мощность пары сил трения в подшипнике отрицательная, поскольку момент трения и угловая скорость вращения противонаправлены.
Мощность системы сил, приложенных к твердому телу, равна скалярному произведению главного вектора R системы на скорость любого полюса тела, сложенному со скалярным произведением главного момента M 0 сил относительно этого полюса на угловую скорости тела:
v O + M |
O ω |
при R = ∑ F i , M O = ∑ r i × F i . |
||||||||||||
5.4. Работа и потенциальная энергия
Элементарной работой силы в выбранной системе координат Oxyz (неподвижной или подвижной) называется бесконечно малая величина, равная скалярному произведению силы на элементарное перемещение точки приложения силы в этой системе:
d ′ A = F |
d r = Xdx + Ydy + Zdz = F | d r | cos(F ,d r ), (Н м=Дж) |
||||
Здесь через d ΄A обозначена бесконечно малая работа, совершаемая силой за бесконечно малый интервал времени, d r - элементарное перемещение, сонаправленное со скоростью точки. Штрихом отмечено, что d ΄A не всегда является полным дифференциалом от некоторой функции.
Очевидно, что произведение Pdt равно элементарной работе d ΄A :

Мощность, умноженная на малый интервал времени ∆t , есть приближенное значение работы ∆A силы за этот интервал, мощность приближенно равна работе силы за 1 сек. Работой силы за конечный интервал времени называется определенный интеграл от мощности по времени:
A12 = ∫ Pdt = ∫ |
v dt при v = r & = dr / dt . |
|||
Для расчета работы по данной общей формуле необходимо знать мощность как функцию времени или силу и скорость в виде функций только времени t . Но в некоторых частных случаях (случай потенциальной силы, случай постоянной силы трения при неизменном направлении движения) возможно вычисление работы без применения кинематических уравнений движения точки приложения силы, достаточно знать только начальное и конечное положение точки.
Рассмотрим движение точки приложения силы по отношению к двум системам отсчета, движущимся одна относительно другой. Скорость точки в двух системах различна, поэтому и мощность силы будет различной. Таким образом, понятия мощность, работа, формулируется по отношению к конкретной системе отсчета, преимущественно – по отношению к ИСО или ПСО (инерционной или поступательной системам отсчета).
Определение Сила F называется потенциальной , а ее силовое поле -
потенциальным силовым полем , если выполнены два условия:
1) Сила удовлетворяет одному из следующих условий: сила постоянна по величине и направлению F = const или зависит только от координат точки (всех трех или части) ее приложения, т.е. F = F (x , y , z ).
2) Элементарная работа d ′ A силы есть полный дифференциал от некоторой функции координат, либо мощность силы в любой момент времени равна полной производной по времени от некоторой функции Π (x , y , z )
Функция П(x ,y ,z ), получаемая посредством преобразования выражения элементарной работы, либо из выражения мощности, называется по-
тенциальной энергией потенциального силового поля в точке M(x, y, z).
Тем самым векторному силовому полю силы F (x , y , z ) сопоставляется
математически более простое поле скалярной функции трех переменных П(x , y , z ), либо - функции двух переменных П(x ,y ), либо - функции одной переменной П(x )
Потенциальная энергия может быть представлена не только в декартовой системе координат, но также - в цилиндрической, сферической системах координат, в общем она является функцией некоторых обобщенных коорди-
нат П(q 1 , q 2 , q 3 ).
Поверхности, определенные уравнением П(q 1 , q 2 , q 3 )=C, где C - произвольно назначаемый постоянный параметр, называются эквипотенциальными поверхностями .
Заметим, что под знаком дифференциала всегда можно прибавить или вычесть любую константу, так что функция П в формуле (5.18) определяется с точностью до константы. Константу произвольно назначают, например, полагают равной нулю, выбирая тем самым уровень отсчета семейства эквипотенциальных поверхностей.
Мощность потенциальной силы равна взятой со знаком минус произ-
водной по времени от потенциальной энергии P = −Π & . Подставим это выражение в определенный интеграл (5.17). Получим выражение работы потенциальной силы на конечном перемещении точки приложения силы, осуществленном за конечный промежуток времени:
A 12 = П(x 1 , y 1 , z 1 ) – П(x 2 , y 2 , z 2 ) = П1 – П2 . |
Таким образом, работа потенциальной силы при ее перемещении за ин-
тервал из точки M 1 (x 1 , y 1 , z 1 ) в точку M 2 (x 2 , y 2 , z 2 ) по любой траектории равна убыли потенциальной энергии на этом перемещении, т.е. равна разно-
сти потенциальных энергий в первой и второй точках потенциального поля. Работа потенциальной силы не зависит от формы траектории, соединяющей две точки. В частности, работа потенциальной силы на любой замкнутой траектории равна нулю, а работа при переходе точки приложения силы с эквипотенциальной поверхности П=С1 на поверхность П=С2 равна разно-
сти констант: А12 =С1 -С2 .
Частный случай В качестве начальной точки M 1 (x 1 , y 1 , z 1 ) возьмем любую точку M (x , y , z ) потенциального поля, а в качестве M 2 (x 2 , y 2 , z 2 ) возьмем такую точку поля M (x O , y O , z O ), в которой потенциальная энергия принята равной
Получаем следующую физическую интерпретацию. Потенциальная энергия в любой точке M потенциального поля равна работе приложенной силы при перемещении ее точки приложения из положения M по любой гладкой или негладкой траектории в такое положение, в котором потенциальная энергия принята равной нулю, а также равна взятой со знаком минус работе силы на перемещении в положение M (x ,y ,z ) из “нулевого” положения, в котором потенциальная энергия принята равной нулю.
Пример 1 Найдем потенциальную энергию силы тяжести G = − Gk , про-
тивонаправленной с ортом k вертикальной оси Oz системы Oxyz . Методом элементарной работы получаем:
d ΄A = G x dx + G y dy + G z dz = –Gdz = – d (Gz ) => П = Gz .
Методом мощности получаем
P = G x x & +G y y & +G z z & = −Gz & = −(Gz ) Π = Gz .
Таким образом, потенциальная энергия силы тяжести равна произведению веса материальной точки на высоту расположения точки M над плоскостью Oxy , удовлетворяющей условию z = 0. Здесь плоскость Oxy назначена

нулевой эквопотенциальной плоскостью. Потенциальная энергия силы тяжести отрицательна в точках, расположенных под плоскостью Oxy , при z < 0. На любых горизонтальных плоскостях данная потенциальная энергия одинакова во всех точках, т.е. горизонтальные плоскости являются эквипотенциальными поверхностями. Работа силы тяжести на перемещении с плоскости уровня z = z 1 на плоскость z = z 2 определяется по формуле:
A 12 = П1 – П2 = G (z 1 – z 2 ) = ± Gh при h = |z 1 –z 2 |.
Эта работа пропорциональна разности (убыли) уровней, она отрицательна, если первый уровень ниже, чем второй.
Замечание . В случае если ось Oz направлена вниз, получаем формулу с обратным знаком: П = –Gz .
Пример 2 . Потенциальная энергии силы упругости пружины. Силовое поле горизонтальной пружины имеет вид горизонтальной оси Ox . Начало оси совместим со свободным концом недеформированной пружины, x - деформация растяжения пружины при x > 0, или сжатия пружины при x < 0. Упругая сила пружины F = − cxi , где i - орт оси x . Она всегда направлена противоположно деформации. Методом мощности находим потенциальную энергию силы упругости
P = Fx x = − c x x = − (c x |
Π = cx |
||||||
Вообразим, что пружина очень медленно растягивается внешней силой,
медленно нарастающей от нуля до значения F вн = cxi . Считаем, что в каждый момент времени упругая сила пружины уравновешивает внешнию силу.
Среднее значение величины силы F вн на интервале равно: F cр = cx / 2 .
Упругая сила пружины, совершая при этом отрицательную работу по сопротивлению растягиванию, запасает в пружине положительную потенциальную
энергию, равную Π = F x = cx 2 / 2. |
||||
Работа упругой силы на деформации |
X 2 − x 1 равна A 12 = (x 2 2 – x 1 2 )c /2. |
|||
Очевидно, что A 12 < 0 при x1 < x2 и A 12 > 0 при x1 > x2 |
||||
3 . Сила тяготения Земли |
по закону "обратных квадратов": |
|||
F = γ m m / r2 , |
= − γ m m r / r 3 , где r - радиус-вектор материальной точки в |
|||
геоцентрической системе отсчета, γ = 6,672· 10–11 (м3 /(кг· с2 ) - постоянная тя-
готения, r / r = e - орт радиус-вектора тела (материальной точки), проведенного из центра Земли, m 1 = 6· 1024 (кг)- масса Земли, m - масса тела, γm 1 =
3986· 1011 (м3 /с2 ) - геоцентрическая гравитационная постоянная. Учитывая
тождества r r = r 2 , |
|||||||||||||||||
γ m1 m |
γ m1 m |
γ m1 m |
γ m1 m |
||||||||||||||
d A = − |
r dr = − |
dr = d (− |
Π(r ) = − |
||||||||||||||
Отметим, что П(r )→0 при r →∞, следовательно, потенциальная энергия |
|||||||||||||||||
на бесконечности принята равной нулю. |
|||||||||||||||||
| " | |||||||||||||||||
Просмотр: эта статья прочитана 49920 раз
Pdf Выберите язык... Русский Украинский Английский
Краткий обзор
Полностью материал скачивается выше, предварительно выбрав язык
Два случая преобразования механического движения материальной точки или системы точек:
- механическое движение переносится с одной механической системы на другую в качестве механического движения;
- механическое движение превращается в другую форму движения материи (в форму потенциальной энергии, теплоту, электричество и т.д.).
Когда рассматривается преобразование механического движения без перехода его в другую форму движения, мерой механического движения является вектор количества движения материальной точки или механической системы. Мерой действия силы в этом случае является вектор импульса силы.
Когда механическое движение превращается в другую форму движения материи, в качестве меры механического движения выступает кинетическая энергия материальной точки или механической системы. Мерой действия силы при превращении механического движения в другую форму движения является работа силы
Кинетическая энергия
Кинетическая энергия это способность тела преодолевать препятствование во время движения.
Кинетическая энергия материальной точки
Кинетической энергией материальной точки называется скалярная величина, которая равняется половине произведения массы точки на квадрат ее скорости.
Кинетическая энергия:
- характеризует и поступательное, и вращательное движения;
- не зависит от направления движения точек системы и не характеризует изменение этих направлений;
- характеризует действие и внутренних, и внешних сил.
Кинетическая энергия механической системы
Кинетическая энергия системы равняется сумме кинетических энергий тел системы. Кинетическая энергия зависит от вида движения тел системы.
Определение кинетической энергии твердого тела при разных видах движения движениях.
Кинетическая энергия поступательного движения
При поступательном движении кинетическая энергия тела равна Т
=m
V 2 /2.
Мерой инертности тела при поступательном движении является масса.
Кинетическая энергия вращательного движения тела
При вращательном движении тела кинетическая энергия равняется половине произведения момента инерции тела относительно оси вращения и квадрата его угловой скорости.
Мерой инертности тела при вращательном движении является момент инерции.
Кинетическая энергия тела не зависит от направления вращения тела.
Кинетическая энергия плоскопаралельного движения тела
При плоскопаралельном движении тела кинетическая энергия равна
Работа силы
Работа силы характеризует действие силы на тело при некотором перемещении и определяет изменение модуля скорости подвижной точки.
Элементарная работа силы
Элементарная работа силы определяется как скалярная величина, равная произведению проекции силы на касательную к траектории, направленную в направлении движения точки, и бесконечно малого перемещения точки, направленного вдоль этой касательной.
Работа силы на конечном перемещении
Работа силы на конечном перемещении равна сумме ее работ на элементарных участках.
Работа силы на конечном перемещении М 1 М 0 равняется интегралу вдоль этого перемещения от элементарной работы.
Работа силы на перемещении М 1 М 2 изображается площадью фигуры, ограниченной осью абсцисс, кривой и ординатами, соответствующими точкам М 1 и М 0 .
Единица измерения работы силы и кинетической энергии в системе СИ 1 (Дж).
Теоремы о работе силы
Теорема 1 . Работа равнодействующей силы на некотором перемещении равна алгебраической сумме работ составляющих сил на том же перемещении.
Теорема 2. Работа постоянной силы на результирующем перемещении равна алгебраической сумме работ этой силы на составляющих перемещениях.
Мощность
Мощность - это величина, которая определяет работу силы за единицу времени.
Единицей измерения мощности есть 1Вт = 1 Дж/с.
Случаи определения работы сил
Работа внутренних сил
Сумма работ внутренних сил твердого тела на любом его перемещении равна нулю.
Работа силы тяжести
Работа силы упругости
Работа силы трения
Работа сил, приложенных к вращающемуся телу
Элементарная работа сил, приложенных к твердому телу, вращающемуся вокруг неподвижной оси, равна произведению главного момента внешних сил относительно оси вращения на приращение угла поворота.
Сопротивление качению
В зоне контакта неподвижого цилиндра и плоскости возникает местная деформация контактного сжатия, напряжение распределяются по эллиптическому закону и линия действия равнодействующей N этих напряжений совпадает с линией действия силы нагрузки на цилиндр Q. При перекатывании цилиндра распределение нагрузки становится несимметричным с максимумом, смещенным в сторону движения. Равнодействующая N смещается на величину k - плечо силы трения качения, которая еще назвается коэффициентом трения качения и имеет размерность длины (см)
Теорема об изменении кинетической энергии материальной точки
Изменение кинетической энергии материальной точки на некотором ее перемещении равняется алгебраической сумме робот всех действующих на точку сил на том же перемещении.
Теорема об изменении кинетической энергии механической системы
Изменение кинетической энергии механической системы на некотором перемещении равняется алгебраической сумме робот внутренних и внешних сил, действующих на материальные точки системы на том же перемещении.
Теорема об изменении кинетической энергии твердого тела
Изменение кинетической энергии твердого тела (неизменной системы) на некотором перемещении равняется сумме робот внешних сил, действующих на точки системы на том же перемещении.
КПД
Силы, действующие в механизмах
Силы и пары сил (моменты), которые приложены к механизму или машине, можно разделить на группы:
1.Движущие силы и моменты, совершающие положительную работу (приложенные к ведущим звеньям, например, давление газа на поршень в ДВС).
2. Силы и моменты сопротивления, совершающие отрицательную работу:
- полезного сопротивления (совершают требуемую от машины работу и приложены к ведомым звеньям, например сопротивление поднимаемого машиной груза),
- силы сопротивления (например, силы трения, сопротивление воздуха и т.п.).
3. Силы тяжести и силы упругости пружин (как положительная, так и отрицательная работа, при этом работа за полный цикл равна нулю).
4. Силы и моменты, приложенные к корпусу или стойке извне (реакция фундамента и т.п.), которые не совершают работу.
5. Силы взаимодействия между звеньями, действующие в кинематических парах.
6. Силы инерции звеньев, обусловленные массой и движением звеньев с ускорением, могут осуществлять положительную, отрицательную работу и не совершать работы.
Работа сил в механизмах
При установившемся режиме работы машины ее кинетическая энергия не изменяется и сумма работ приложенных к ней движущих сил и сил сопротивления равна нулю.
Работа, затрачиваемая на приведение машины в движение, расходуется на преодоление полезных и вредных сопротивлений.
КПД механизмов
Механический коэффициент полезного действия при установившемся движении равен отношению полезной работы машины к работе, затраченной на приведение машины в движение:
Элементы машины могут соединяться последовательно, параллельно и смешанно.
КПД при последовательном соединении
При последовательном соединении механизмов общий КПД меньше с наименьшего КПД отдельного механизма.
КПД при параллельном соединении
При параллельном соединении механизмов общий КПД больше наименьшего и меньше наибольшего КПД отдельного механизма.
Формат: pdf
Язык: русский, украинский
Пример расчета прямозубой цилиндрической передачи
Пример расчета прямозубой цилиндрической передачи. Выполнен выбор материала, расчет допускаемых напряжений, расчет на контактную и изгибную прочность.
Пример решения задачи на изгиб балки
В примере построены эпюры поперечных сил и изгибающих моментов, найдено опасное сечение и подобран двутавр. В задаче проанализировано построение эпюр с помощью дифференциальных зависимостей, провелен сравнительный анализ различных поперечных сечений балки.
Пример решения задачи на кручение вала
Задача состоит в проверке прочности стального вала при заданном диаметре, материале и допускаемых напряжениях. В ходе решения строятся эпюры крутящих моментов, касательных напряжений и углов закручивания. Собственный вес вала не учитывается
Пример решения задачи на растяжение-сжатие стержня
Задача состоит в проверке прочности стального стержня при заданных допускаемых напряжениях. В ходе решения строятся эпюры продольных сил, нормальных напряжений и перемещений. Собственный вес стержня не учитывается
Применение теоремы о сохранении кинетической энергии
Пример решения задачи на применение теоремы о сохранение кинетической энергии механической системы
Элементарной работой силы на перемещении (рис. 3.22) называется скалярное произведение силы на элементарное перемещение точки ее приложения:
где a – угол между направлениями векторов и
Так как  то можно записать еще одно выражение элементарной работы:
то можно записать еще одно выражение элементарной работы:
Для элементарной работы можно записать еще несколько выражений:


Из формул элементарной работы следует, что эта величина может быть положительной (угол a острый), отрицательной (угол a тупой) или равна нулю (угол a прямой).
Полная работа сил . Для определения полной работы силы на перемещении от точки M 0 до М разобьем это перемещение на n перемещений, каждое из которых в пределе переходит в элементарное. Тогда работа силы А :

где dA k – работа на k -м элементарном перемещении.
Записанная сумма является интегральной и может быть заменена криволинейным интегралом, взятым вдоль кривой на перемещении M 0 М. Тогда
или 
где момент времени t =0 соответствует точке M 0 , а момент времени t – точке М .
Из определения элементарной и полной работы следует:
1) работа равнодействующей силы на каком–либо перемещении равна алгебраической сумме работ составляющих сил на этом перемещении;
2) работа сил на полном перемещении равна сумме работ этой же силы на составляющих перемещениях, на которые любым образом разбито все перемещение.
Мощность силы. Мощностью силы называют работу за единицу времени:

или с учетом, что 

Мощность силы – это величина, равная скалярному произведению силы на скорость точки ее приложения.
Таким образом, при постоянной мощности увеличение скорости ведет к уменьшению силы и наоборот. Единицей измерения мощности является Ватт : 1Вт=1 Дж/с.
Если сила приложена к телу, вращающемуся вокруг неподвижной оси, то ее мощность равна

Аналогично определяется и мощность пары сил.
3.3.4.3. Примеры вычисления работы силы
Полная работа силы –
где h – высота, на которую опустилась точка.
Таким образом, работа силы тяжести положительная, когда точка опускается, и отрицательная, когда точка поднимается. Работа силы тяжести не зависит от формы траектории между точками M 0 и M 1 .
Работа линейной силы упругости. Линейной силой упругости называют силу, действующую по закону Гука (рис. 3.24):

где – радиус-вектор, проведенный из точки равновесия, где сила равна нулю, до рассматриваемой точки М ; с – постоянный коэффициент жесткости.
Работа силы на перемещении от точки M 0 до точки M 1 определим по формуле

Выполняя интегрирование, получаем
 (3.27)
(3.27)
| Рис. 3.25 |
По формуле (3.27) вычисляют работу линейной силы упругости пружин при перемещении по любому пути из точки M
0 , в которой ее начальная деформация равна  в точку M
1 , где деформация соответственно равна
в точку M
1 , где деформация соответственно равна  В новых обозначениях формула (3.27) принимает вид
В новых обозначениях формула (3.27) принимает вид

Работа силы, приложенной к вращающемуся твердому телу . При вращении твердого тела вокруг неподвижной оси скорость точки М можно вычислить по формуле Эйлера, см. рис. 3.25:

Тогда элементарную работу силы определим по формуле
Используя свойство смешанного векторного произведения  получим
получим
Так как  – момент силы относительно точки О
. Учитывая, что
– момент силы относительно точки О
. Учитывая, что  – момент силы относительно оси вращения Oz
и ωdt
=d
φ, окончательно получаем:
– момент силы относительно оси вращения Oz
и ωdt
=d
φ, окончательно получаем:
dA =M z d φ.
Элементарная работа силы, приложенной к какой–либо точке тела, вращающегося вокруг неподвижной оси, равна произведению момента силы относительно оси вращения на дифференциал угла поворота тела.
Полная работа:

В частном случае, когда  , работу определяют по формуле
, работу определяют по формуле

где j – угол поворота тела, на котором вычисляют работу силы.
| Рис. 3.26 |
Работа внутренних сил твердого тела . Докажем, что работа внутренних сил твердого тела равна нулю при любом его перемещении. Достаточно доказать, что сумма элементарных работ всех внутренних сил равна нулю. Рассмотрим две любые точки тела M 1 и M 2 (рис. 3.26). Так как внутренние силы есть силы взаимодействия точек тела, то:
Введем единичный вектор направленный по силе Тогда
Сумма элементарных работ сил и равна
Раскрывая скалярные произведения векторов в скобках, получаем
Так как в кинематике доказано, что проекции скоростей любых двух точек твердого тела на направление прямой линии, соединяющей эти точки, равны друг другу при любом движении твердого тела, то в полученном выражении в скобках стоит разность одинаковых величин, т.е. величина, равная нулю.

3.3.4.4. Теорема об изменении кинетической энергии точки
Для материальной точки массой m , движущейся под действием силы основной закон динамики можно представить в виде

Умножая обе части этого соотношения скалярно на дифференциал радиус-вектора точки имеем
 или
или 
Учитывая, что  – элементарная работа силы,
– элементарная работа силы,

 (3.28)
(3.28)
Формула (3.28) выражает теорему об изменении кинетической энергии для точки в дифференциальной форме.
Дифференциал кинетической энергии точки равен элементарной работе силы, действующей на точку.
Если обе части равенства (3.28) проинтегрировать от точки M 0 до точки М (см. рис. 3.22), получаем теорему об изменении кинетической энергии точки в конечной форме:

Изменение кинетической энергии точки на каком–либо перемещении равно работе силы, действующей на точку на том же перемещении.
3.4.4.5. Теорема об изменении кинетической энергии системы
Для каждой точки системы можно выразить теорему об изменении кинетической энергии в форме:

Суммируя правые и левые части этих соотношений по всем точкам системы и вынося знак дифференциала за знак суммы, получаем:
 или
или
где  – кинетическая энергия системы;
– кинетическая энергия системы; 
 – элементарная работа внешних и внутренних сил соответственно.
– элементарная работа внешних и внутренних сил соответственно.
Формула (3.29) выражает теорему об изменении кинетической энергии системы в дифференциальной форме.
Дифференциал от кинетической энергии системы равен сумме элементарных работ всех внешних и внутренних сил, действующих на систему.
Если обе части (3.29) проинтегрировать между двумя положениями системы – начальным и конечным, в которых кинетическая энергия равна T 0 и Т , то, изменяя порядок суммирования и интегрирования, имеем:
 или
или
где  – работа внешней силы для точки системы M k
при ее перемещении из начального положения в конечное положение M k
;
– работа внешней силы для точки системы M k
при ее перемещении из начального положения в конечное положение M k
;  – работа внутренней силы, действующей на точку M k
.
– работа внутренней силы, действующей на точку M k
.
Формула (3.30) выражает теорему об изменении кинетической энергии системы в конечной или интегральной форме.
Изменение кинетической энергии системы при ее перемещении из одного положения в другое равно сумме работ всех внешних и внутренних сил, действующих на систему, на соответствующих перемещениях точек системы при том же перемещении системы.
Работа внутренних сил на конечном перемещении равна нулю.
Работа силы, действующей на поступательно движущееся тело равна произведению этой силы на приращение линейного перемещения.
Работа силы, действующей на вращающееся тело равна произведению момента этой силы относительно оси вращения на приращение угла поворота: ; . Мощность:  .
.
Кинетическая энергия механической системы при различных видах движения.
Кинетическая энергия механической системы
- скаляр, равный сумме кинетических энергий всех точек системы:  .
.
При поступательном движении: 
При вращательном движении: 
При плоскопараллельном движении: , где d - расстояние от центра масс до МЦС
27. Теорема об изменении кинетической энергии материальнойточки.
Кинетическая энергия материальной точки - скаляр, равный половине произведение массы точки на квадрат ее скорости.
Основное уравнение динамики:  , помножим на элементарное перемещение:
, помножим на элементарное перемещение:  ; ;
; ;  . Интегрируя полученное выражение:
. Интегрируя полученное выражение:
Теорема : изменение кинетической энергии материальной точки на некотором перемещении равно работе силы, действующей на точку, на том же перемещении.
Теорема об изменении кинетической энергии механической системы.
Так как работа внутренних сил равна нулю, то:  .
.
Теорема : изменение кинетической энергии механической системы на конечном перемещении равно сумме работ внешних сил на том же перемещении.
Принцип возможных перемещений для механической системы.
 ; , пусть связи, наложенные на точки механической системы двусторонние, стационарные, голономные и идеальные, тогда: .
; , пусть связи, наложенные на точки механической системы двусторонние, стационарные, голономные и идеальные, тогда: .
Принцип возможных перемещений - принцип Лагранжа - для равновесия механической системы с двусторонними, стационарными, голономными и идеальными связями необходимо и достаточно, чтоб алгебраическая сумма работ задаваемых сил на возможном перемещении равнялась нулю.
Принцип Даламбера для материальной точки.

Геометрическая сумма всех приложенных к движущейся материальной точке сил и сил инерции этой точки равна нулю
Принцип Даламбера для несвободной механической системы.

В движущейся несвободной механической системе для каждой материальной точки в любой момент времени геометрическая сумма приложенных к ней задаваемых сил, реакций связи и сил инерции равна нулю. Умножив обе части выражения на r i получим: ;  .
.
 , сумма моментов задаваемых сил, реакций связи и сил инерции относительно осей координат равна нулю.
, сумма моментов задаваемых сил, реакций связи и сил инерции относительно осей координат равна нулю.
Приведение сил инерции точек твердого тела к простейшему виду.
К системе сил инерции точек твердого тела, можно применить метод Пуансона, рассмотренный в статике. Тогда любую систему сил инерции можно привести к главному вектору сил инерции и главному моменту сил инерции.
При поступательном движении: Ф=-ma (при поступательном движении твердого тела, силы инерции его точек приводятся к главному вектору сил инерции равному по модулю произведению массы тела, на ускорение центра масс приложенному в этом центре и направленному в сторону противоположному ускорению центра масс).
При вращательном движении: М=-Iε (при вращательном движении твердого тела силы инерции его точек приводятся к главному моменту сил инерции равному произведению момента инерции тела относительно сил вращения на угловое ускорение. Направлен этот момент в сторону противоположному угловому ускорению).
При плоском движении: Ф=-ma М=-Iε (при плоском движении твердого тела силы инерции его точек приводятся к главному вектору и главному моменту сил инерции).
Общее уравнение динамики. Принцип Даламбера-Лагранжа.
Принцип Даламбера: å(P i + R i + Ф i) = 0; å(P i + R i + Ф i)Dr i = 0, полагаем. что связи, наложенные на механическую систему двусторонние, стационарные, голономные и идеальные, тогда: å(R i × Dr i) = 0;
å(P i + Ф i)Dr i = 0 - общее уравнение динамики - для движения механической системы с двусторонними, стационарными, голономными и идеальными связями сумма работ задаваемых сил и сил инерции точек системы на любом возможном перемещении равна нулю.
Рассмотрим две произвольные точки твердого тела М 1 и М 2 , являющиеся частью механической системы. Проведем построения (см. рис.14.13).
Внутренние силы P J 1 , P J 2 , действующие со стороны одной точки на другую, на основании закона равенства действия и противодействия равны по модулю и противонапралены P J 1 = - P J 2 .
Пусть в данное мгновение скорости точек равны соответственно u 1 и u 2 и за промежуток времени приращения вдоль векторов составляют ds 1 = u 1 dt , ds 2 = u 2 dt .
Т.к., на основании 1-го следствия теоремы о скоростях точек плоской фигуры проекции векторов скоростей на направление отрезка М 1 М 2 равны, то и проекции элементарных перемещений этих точек будут равны.
Поэтому, вычисляя сумму элементарных работ 2-х внутренних сил на рассматриваемом перемещении и учитывая их равенство и противонаправленность получим
P J 1 ds 1 cos(P J 1 , u 1) + P J 2 ds 1 cos(P J 2 , u 2)= P J 1 * M 1 M’ 1 - P J 1 *M 2 M’ 2 = 0.
Поскольку каждой внутренней силе соответствует другая, равная по модулю и противонапраленная, то сумма элементарных работ всех внутренних сил равна нулю.
Конечное перемещение является совокупностью элементарных перемещений, а поэтому
А j = 0 ,
т.е. сумма работ внутренних сил твердого тела на любом его перемещении равна нулю.
Поступательное движение твердого тела .
При поступательном движении твердого тела траектории всех его точек тождественны и параллельны. Поэтому векторы элементарных перемещений геометрически равны.
Элементарная работа силы P E i
d A E i = P E i dr.
Для всех сил будет
d A=Sd A E i = S P E i dr= dr S P E = dr R E .
Следовательно,
d A=dr R E . (14-46)
Элементарная работа сил, приложенных к твердому телу, движущемуся поступательно, равна элементарной работе главного вектора сил .
А= . (14-47)
Элементарная работа сил, приложенных к твердому телу, вращающемуся вокруг неподвижной оси, равна произведению главного момента внешних сил относительно оси вращения на приращение угла поворота .
Работа на конечном перемещении
SA i = , (14-48)
где - главный момент внешних сил относительно оси вращения.
Если главный момент постоянен, то
SA i = E z = E z (j 2 - j 1). (14-49)
В этом случае сумма работ на конечном перемещении равна произведению главного момента внешних сил на конечное изменение угла поворота тела.
Тогда мощность
N= =M E z dj/dt= M E z w. (14-50)
В общем случае движения элементарная работа внешних сил, приложенных к свободному твердому телу, равна
dA= SdA i = R E dr O + M E W da, (14-51)
где M E W - главный момент внешних сил относительно мгновенной оси; da - элементарный угол поворота относительно мгновенной оси.
14.10. Сопротивление при качении .
На цилиндрический каток, находящийся на горизонтальной плоскости в состоянии покоя (рис.14.14,а) действуют две взаимно уравновешивающиеся силы: вес катка G и нормальная реакция плоскости N = -G .
Если под действием горизонтальной силы Р , приложенной в центре катка С, он катится по плоскости без скольжения, то силы G , N образуют пару сил, препятствующую качению (рис. 14.14,б).
Возникновение этой пары сил обусловлено деформацией контактирующих поверхностей катка и плоскости. Линия действия реакции N оказывается сдвинутой на некоторое расстояние d от линии действия силы G.
Момент пары сил G , N называется моментом сопротивления качению. Его величина определяется произведением
М сопр = Nd . (14-52)
Коэффициент качения выражается в линейных единицах, т.е. [d]= см. Например, стальной бандаж по стальному рельсу d = 0,005 см.; дерево по стали d = 0,03- 0,04 см.
Определим наименьшую горизонтальную силу Р , приложенную к центру катка.
Чтобы каток начал катиться, момент пары сил, составленный силой Р и силой сцепления F сц, должен стать больше момента сопротивления, т.е.
PR> Nd .
Откуда P> Nd/R .
Т.к. здесь N=G, то