Каноническими уравнениями прямой в пространстве называются уравнения, определяющие прямую, проходящую через заданную точку коллинеарно направляющему вектору.
Пусть дана точка и направляющий вектор . Произвольная точка лежит на прямой l только в том случае, если векторы и коллинеарны, т. е. для них выполняется условие:
![]() .
.
Приведённые выше уравнения и есть канонические уравнения прямой.
Числа m , n и p являются проекциями направляющего вектора на координатные оси. Так как вектор ненулевой, то все числа m , n и p не могут одновременно равняться нулю. Но одно или два из них могут оказаться равными нулю. В аналитической геометрии допускается, например, такая запись:
![]() ,
,
которая означает, что проекции вектора на оси Oy и Oz равны нулю. Поэтому и вектор , и прямая, заданная каноническими уравнениями, перпендикулярны осям Oy и Oz , т. е. плоскости yOz .
Пример 1.
Составить уравнения прямой в пространстве,
перпендикулярной плоскости ![]() и проходящей через точку пересечения этой плоскости с осью Oz
.
и проходящей через точку пересечения этой плоскости с осью Oz
.
Решение. Найдём точку пересечения данной плоскости с осью Oz
. Так как любая точка, лежащая на оси Oz
, имеет координаты , то, полагая в заданном уравнении плоскости x = y =
0
, получим 4z
- 8 = 0
или z
= 2
. Следовательно, точка пересечения данной плоскости с осью Oz
имеет координаты (0; 0; 2)
. Поскольку искомая прямая перпендикулярна плоскости, она параллельна вектору её нормали . Поэтому направляющим вектором прямой может служить вектор нормали ![]() заданной плоскости.
заданной плоскости.
Теперь запишем искомые уравнения прямой, проходящей через точку A = (0; 0; 2) в направлении вектора :
![]()
Уравнения прямой, проходящей через две данные точки
Прямая может быть задана двумя лежащими на ней точками ![]() и
и ![]() В этом случае направляющим вектором прямой может служить вектор . Тогда канонические уравнения прямой примут вид
В этом случае направляющим вектором прямой может служить вектор . Тогда канонические уравнения прямой примут вид
![]() .
.
Приведённые выше уравнения и определяют прямую, проходящую через две заданные точки.
Пример 2. Составить уравнение прямой в пространстве, проходящей через точки и .
Решение. Запишем искомые уравнения прямой в виде, приведённом выше в теоретической справке:
![]()
![]() .
.
Так как , то искомая прямая перпендикулярна оси Oy .
Прямая как линия пересечения плоскостей
Прямая в пространстве может быть определена как линия пересечения двух непараллельных плоскостей и , т. е. как множество точек, удовлетворяющих системе двух линейных уравнений

Уравнения системы называются также общими уравнениями прямой в пространстве.
Пример 3. Составить канонические уравнения прямой в пространстве, заданной общими уравнениями
![]()
Решение. Чтобы написать канонические уравнения прямой или, что то же самое, уравнения прямой, проходящей через две данные точки, нужно найти координаты каких-либо двух точек прямой. Ими могут служить точки пересечения прямой с какими-нибудь двумя координатными плоскостями, например yOz и xOz .
Точка пересечения прямой с плоскостью yOz имеет абсциссу x = 0 . Поэтому, полагая в данной системе уравнений x = 0 , получим систему с двумя переменными:
![]()
Её решение y = 2 , z = 6 вместе с x = 0 определяет точку A (0; 2; 6) искомой прямой. Полагая затем в заданной системе уравнений y = 0 , получим систему
Её решение x = -2 , z = 0 вместе с y = 0 определяет точку B (-2; 0; 0) пересечения прямой с плоскостью xOz .
Теперь запишем уравнения прямой, проходящей через точки A (0; 2; 6) и B (-2; 0; 0) :
![]() ,
,
или после деления знаменателей на -2:
![]() ,
,
В задаче необходимо найти линию пересечения двух плоскостей и определить натуральную величину одной из них методом плоскопараллельного перемещения.
Для решения такой классической задачи по начертательной геометрии необходимо знать следующий теоретический материал:
— нанесение проекций точек пространства на комплексный чертеж по заданным координатам;
— способы задания плоскости на комплексном чертеже, плоскости общего и частного положения;
— главные линии плоскости;
— определение точки пересечения прямой линии с плоскостью (нахождение «точки встречи» );
— метод плоскопараллельного перемещения для определения натуральной величины плоской фигуры;
— определение видимости на чертеже прямых линий и плоскостей с помощью конкурирующих точек.
Порядок решения Задачи
1. Согласно варианту Задания по координатам точек наносим на комплексный чертеж две плоскости, заданные в виде треугольников ABC (A’, B’, C’; A, B, C) и DKE (D’, K’, E’; D, K, Е) (рис.1.1 ).
Рис.1.1
2 . Для нахождения линии пересечения воспользуемся методом проецирующей плоскости . Суть его в том, что берется одна сторона (линия) первой плоскости (треугольника) и заключается в проецирующую плоскость. Определяется точка пересечения этой линии с плоскостью второго треугольника. Повторив эту задачу еще раз, но для прямой второго треугольника и плоскости первого треугольника, определим вторую точку пересечения. Так как полученные точки одновременно принадлежат обеим плоскостям, они должны находиться на линии пересечения этих плоскостей. Соединив эти точки прямой, будем иметь искомую линию пересечения плоскостей.
3. Задача решается следующим образом:
а) заключаем в проецирующую плоскость Ф(Ф’) сторону AB (A ’ B ’) первого треугольника во фронтальной плоскости проекций V . Отмечаем точки пересечения проецирующей плоскости со сторонами DK и DE второго треугольника, получая точки 1(1’) и 2 (2’) . Переносим их по линиям связи на горизонтальную плоскость проекций H на соответствующие стороны треугольника, точка 1 (1) на стороне DE и точка 2(2) на стороне DK .

Рис.1.2
б) соединив проекции точек 1 и 2 , будем иметь проекцию проецирующей плоскости Ф . Тогда точка пересечения прямой АВ с плоскостью треугольника DKE определится (согласно правилу) вместе пересечения проекции проецирующей плоскости 1-2 и одноименной проекции прямой AB . Таким образом, получили горизонтальную проекцию первой точки пересечения плоскостей – M , по которой определяем (проецируем по линиям связи) её фронтальную проекцию – M ’ на прямой A ’ B ’ (рис.1.2.а );
в) аналогичным путем находим вторую точку. Заключаем в проецирующую плоскость Г(Г) сторону второго треугольника DK (DK ) . Отмечаем точки пересечения проецирующей плоскости со сторонами первого треугольника AC и BC во горизонтальной проекции, получая проекции точек 3 и 4 . Проецируем их на соответствующие стороны в фронтальной плоскости, получаем 3’ и 4’ . Соединив их прямой, имеем проекцию проецирующей плоскости. Тогда вторая точка пересечения плоскостей будет в месте пересечения линии 3’-4’ со стороной треугольника D ’ K ’ , которую заключали в проецирующую плоскость. Таким образом, получили фронтальную проекцию второй точки пересечения – N ’ , по линии связи находим горизонтальную проекцию – N (рис.1.2.б ).
г) соединив полученные точки MN (MN ) и (M ’ N ’) на горизонтальной и фронтальной плоскостях, имеем искомую линию пересечения заданных плоскостей.
4. С помощью конкурирующих точек определяем видимость плоскостей. Возьмем пару конкурирующих точек, например, 1’=5’ во фронтальной проекции. Спроецируем их на соответствующие стороны в горизонтальную плоскость, получим 1 и 5 . Видим, что точка 1 , лежащая на стороне D Е имеет большую координату до оси x , чем точка 5 , лежащая на стороне A В . Следовательно, согласно правилу, большей координаты, точка 1 и сторона треугольника D ’Е ’ во фронтальной плоскости будут видимые. Таким образом, определяется видимость каждой стороны треугольника в горизонтальной и фронтальной плоскостях. Видимые линии на чертежах проводятся сплошной контурной линией, а не видимые — штриховой линией. Напомним, что в точках пересечения плоскостей (M — N и M ’- N ’ ) будет происходить смена видимости.
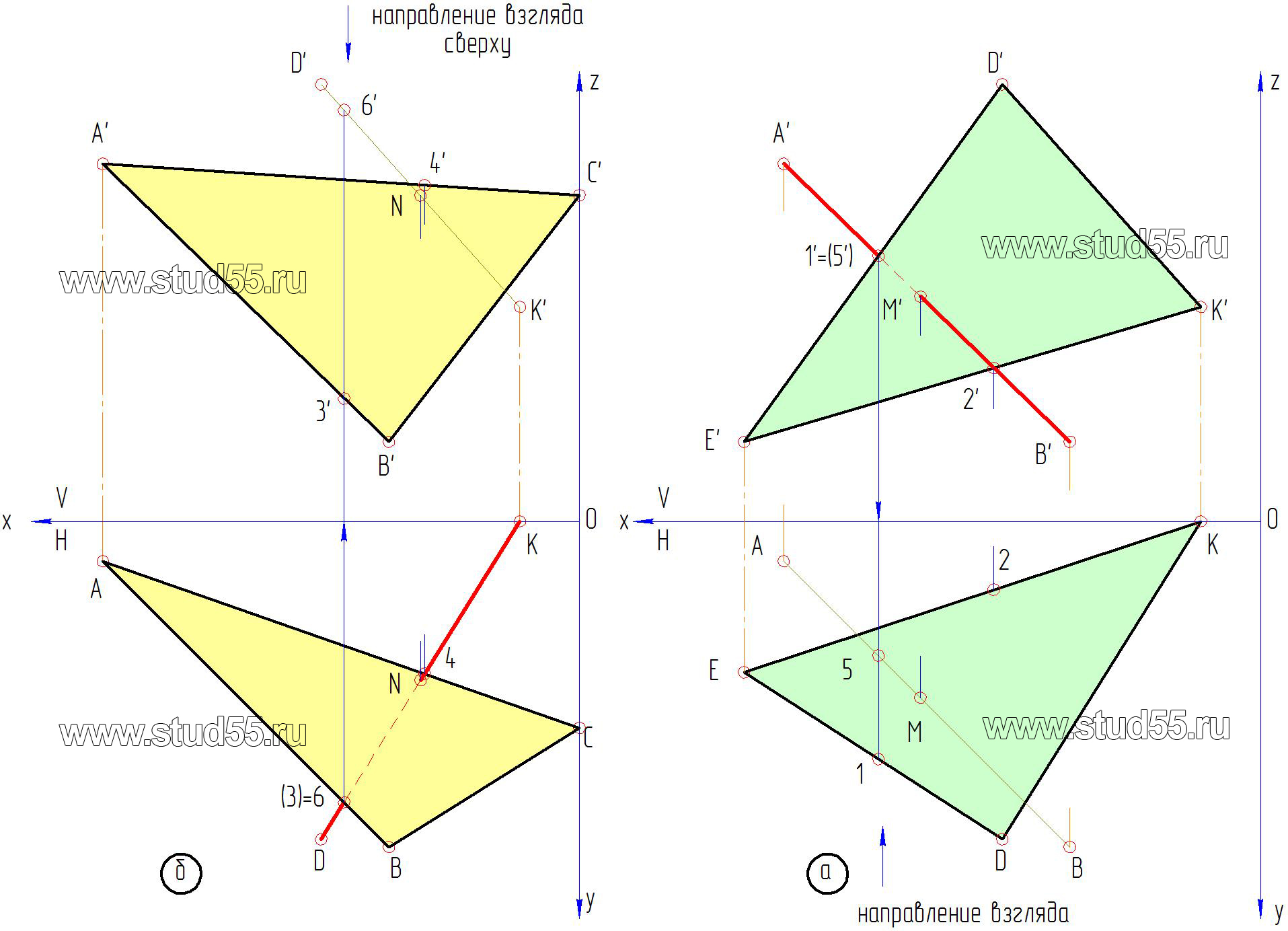
Рис.1.3

Р ис.1. 4 .
На эпюре дополнительно показано определение видимости в горизонтальной плоскости с использованием конкурирующих точек 3 и 6 на прямых DK и АВ .
5. Методом плоскопараллельного перемещения определяем натуральную величину плоскости треугольника ABC , для чего:
а) в указанной плоскости через точку С(С) проводим фронталь C — F (С- F и C ’- F ’) ;
б) на свободном поле чертежа во горизонтальной проекции берем (отмечаем) произвольную точку С 1 , считая, что это одна из вершин треугольника (конкретно вершина C ). Из нее восстанавливаем перпендикуляр к фронтальной плоскости (через ось х );

Рис.1.5
в) плоскопараллельным перемещением переводим горизонтальную проекцию треугольника ABC , в новое положение A 1 B 1 C 1 таким образом, чтобы в фронтальной проекции он занял проецирующее положение (преобразовался в прямую линию). Для этого: на перпендикуляре от точки С 1 , откладываем фронтальную проекцию горизонтали C 1 — F 1 (длина l CF ) получаем точку F 1 . Раствором циркуля из точки F 1 величиною F-A делаем дуговую засечку, а из точки C 1 — засечку величиной CA , тогда в пересечении дуговых линий получаем точку A 1 (вторая вершина треугольника);
— аналогично получаем точку B 1 (из точки C 1 делаем засечку величиной C — B (57мм), а из точки F 1 величиной F — B (90мм).Заметим, что при правильном решении три точки A 1 F ’ 1 и B ’ 1 должны лежать на одной прямой (сторона треугольника A 1 — B 1 )две другие стороны С 1 — A 1 и C 1 — B 1 получаются путем соединения их вершин;
г) из метода вращения следует, что при перемещении или вращении точки в какой-то плоскости проекций — на сопряженной плоскости проекция этой точки должна двигаться по прямой линии, в нашем конкретном случае по прямой параллельной оси х . Тогда проводим из точек A ’ B ’ C ’ фронтальной проекции эти прямые (их называют плоскостями вращения точек), а из фронтальных проекций перемещенных точек A 1 В 1 C 1 восстановим перпендикуляры (линии связи) (рис.1.6 ).

Рис.1.6
Пересечения указанных линий с соответствующими перпендикулярами дает новые положения фронтальной проекции треугольника ABC , конкретно A ’ 1 В’ 1 C ’ 1 который должен стать проецирующим (прямой линией), поскольку горизонталь h 1 мы провели перпендикулярно фронтальной плоскости проекций (рис.1.6 );
5) тогда для получения натуральной величины треугольника достаточно его фронтальную проекцию развернуть до параллельности с горизонтальной плоскостью. Разворот осуществляем с помощью циркуля через точку А’ 1 , считая ее как центр вращения, ставим треугольник A ’ 1 В’ 1 C ’ 1 параллельно оси х , получаем A ’ 2 В’ 2 C ’ 2 . Как было сказано выше, при вращении точки, на сопряженной (теперь на горизонтальной) проекции они двигаются по прямым параллельным оси х . Опуская перпендикуляры (линии связи) из фронтальных проекций точек A ’ 2 В’ 2 C ’ 2 пересечения их с соответствующими линиями находим горизонтальную проекцию треугольника ABC (A 2 В 2 C 2 ) в натуральную величину (рис.1.7 ).

Рис. 1.7
У меня есть все готовые решения задач с такими координатами, купить можно

Цена 55 руб
, чертежи по начертательной геометрии из книжки Фролова Вы легко можете скачать сразу после оплаты или я вышлю Вам на почту. Они находятся в ZIP архиве в различных форматах:
*.jpg
– обычный цветной рисунок чертежа в масштабе 1 к 1 в хорошем разрешении 300 dpi;
*.cdw
– формат программы Компас 12 и выше или версии LT;
*.dwg и.dxf
— формат программы AUTOCAD, nanoCAD;
Рассмотрим решение примера.
Пример.
Найдите координаты любой точки прямой, заданной в пространстве уравнениями двух пересекающихся плоскостей  .
.
Решение.
Перепишем систему уравнений в следующем виде
В качестве базисного минора основной матрицы системы возьмем отличный от нуля минор второго порядка  , то есть, z
– свободная неизвестная переменная. Перенесем слагаемые, содержащие z
, в правые части уравнений: .
, то есть, z
– свободная неизвестная переменная. Перенесем слагаемые, содержащие z
, в правые части уравнений: .
Примем , где - произвольное действительное число, тогда .
Решим полученную систему уравнений :
Таким образом, общее решение системы уравнений имеет вид , где .
Если взять конкретное значение параметра , то мы получим частное решение системы уравнений, которое нам дает искомые координаты точки, лежащей на заданной прямой. Возьмем , тогда  , следовательно, - искомая точка прямой.
, следовательно, - искомая точка прямой.
Можно выполнить проверку найденных координат точки, подставив их в исходые уравнения двух пересекающихся плоскостей:
Ответ:
Направляющий вектор прямой, по которой пересекаются две плоскости.
В прямоугольной системе координат от прямой линии неотделим направляющий вектор прямой . Когда прямая а в прямоугольной системе координат в трехмерном пространстве задана уравнениями двух пересекающихся плоскостей и , то координаты направляющего вектора прямой не видны. Сейчас мы покажем, как их определять.
Мы знаем, что прямая перпендикулярна к плоскости, когда она перпендикулярна любой прямой, лежащей в этой плоскости. Тогда нормальный вектор плоскости перпендикулярен любому ненулевому вектору, лежащему в этой плоскости. Этими фактами и воспользуемся при нахождении направляющего вектора прямой.
Прямая а
лежит как в плоскости , так и в плоскости . Следовательно, направляющий вектор прямой а
перпендикулярен и нормальному вектору ![]() плоскости , и нормальному вектору
плоскости , и нормальному вектору ![]() плоскости . Таким образом, направляющим вектором прямой а
является
плоскости . Таким образом, направляющим вектором прямой а
является ![]() и
и ![]() :
:
Множество всех направляющих векторов прямой а
мы можем задать как  , где - параметр, принимающий любые действительные значения, отличные от нуля.
, где - параметр, принимающий любые действительные значения, отличные от нуля.
Пример.
Найдите координаты любого направляющего вектора прямой, которая задана в прямоугольной системе координат Oxyz
в трехмерном пространстве уравнениями двух пересекающихся плоскостей  .
.
Решение.
Нормальными векторами плоскостей и являются векторы ![]() и
и ![]() соответственно. Направляющим вектором прямой, являющейся пересечением двух заданных плоскостей, примем векторное произведение нормальных векторов:
соответственно. Направляющим вектором прямой, являющейся пересечением двух заданных плоскостей, примем векторное произведение нормальных векторов:
Ответ:
![]()
Переход к параметрическим и каноническим уравнениям прямой в пространстве.
Бывают случаи, в которых использование уравнений двух пересекающихся плоскостей для описания прямой не совсем удобно. Некоторые задачи проще решаются, если известны канонические уравнения прямой в пространстве вида  или параметрические уравнения прямой в пространстве вида
или параметрические уравнения прямой в пространстве вида  , где x 1
, y 1
, z 1
- координаты некоторой точки прямой, a x
, a y
, a z
- координаты направляющего вектора прямой, а - параметр, принимающий произвольные действительные значения. Опишем процесс перехода от уравнений прямой вида
, где x 1
, y 1
, z 1
- координаты некоторой точки прямой, a x
, a y
, a z
- координаты направляющего вектора прямой, а - параметр, принимающий произвольные действительные значения. Опишем процесс перехода от уравнений прямой вида  к каноническим и параметрическим уравнениям прямой в пространстве.
к каноническим и параметрическим уравнениям прямой в пространстве.
В предыдущих пунктах мы научились находить координаты некоторой точки прямой, а также координаты некоторого направляющего вектора прямой, которая задана уравнениями двух пересекающихся плоскостей. Этих данных достаточно, чтобы записать и канонические и параметрические уравнения этой прямой в прямоугольной системе координат в пространстве.
Рассмотрим решение примера, а после этого покажем еще один способ нахождения канонических и параметрических уравнений прямой в пространстве.
Пример.

Решение.
Вычислим сначала координаты направляющего вектора прямой. Для этого найдем векторное произведение нормальных векторов ![]() и
и ![]() плоскостей
плоскостей ![]() и
и ![]() :
:
То есть, .
Теперь определим координаты некоторой точки заданной прямой. Для этого найдем одно из решений системы уравнений  .
.
Определитель  отличен от нуля, возьмем его в качестве базисного минора основной матрицы системы. Тогда переменная z
является свободной, переносим слагаемые с ней в правые части уравнений, и придаем переменной z
произвольное значение :
отличен от нуля, возьмем его в качестве базисного минора основной матрицы системы. Тогда переменная z
является свободной, переносим слагаемые с ней в правые части уравнений, и придаем переменной z
произвольное значение :
Решаем методом Крамера полученную систему уравнений:
Следовательно,
Примем , при этом получаем координаты точки прямой:  .
.
Теперь мы можем записать требуемые канонические и параметрические уравнения исходной прямой в пространстве:
Ответ:
![]() и
и 
Вот второй способ решения этой задачи.
При нахождении координат некоторой точки прямой мы решаем систему уравнений . В общем случае ее решения можно записать в виде .
А это как раз искомые параметрические уравнения прямой в пространстве. Если каждое из полученных уравнений разрешить относительно параметра и после этого приравнять правые части равенств, то получим канонические уравнения прямой в пространстве
Покажем решение предыдущей задачи по этому методу.
Пример.
Прямая в трехмерном пространстве задана уравнениями двух пересекающихся плоскостей . Напишите канонические и параметрические уравнения этой прямой.
Решение.
Решаем данную систему из двух уравнений с тремя неизвестными (решение приведено в предыдущем примере, не будем повторяться). При этом получаем . Это и есть искомые параметрические уравнения прямой в пространстве.
Осталось получить канонические уравнения прямой в пространстве:
Полученные уравнения прямой внешне отличаются от уравнений, полученных в предыдущем примере, однако они эквивалентны, так как определяют одно и то же множество точек трехмерного пространства (а значит, одну и ту же прямую).
Ответ:
 и
и 
Список литературы.
- Бугров Я.С., Никольский С.М. Высшая математика. Том первый: элементы линейной алгебры и аналитической геометрии.
- Ильин В.А., Позняк Э.Г. Аналитическая геометрия.
Через каждую прямую в пространстве проходит бесчисленное множество плоскостей. Любые две из них, пересекаясь, определяют ее в пространстве. Следовательно, уравнения любых двух таких плоскостей, рассматриваемые совместно представляют собой уравнения этой прямой.
Вообще любые две не параллельные плоскости, заданные общими уравнениями
определяют прямую их пересечения. Эти уравнения называются общими уравнениями прямой
Билет 6 Записать выражение для угла между прямой и плоскостью, условие параллельности и перпендикулярности прямой и плоскости.
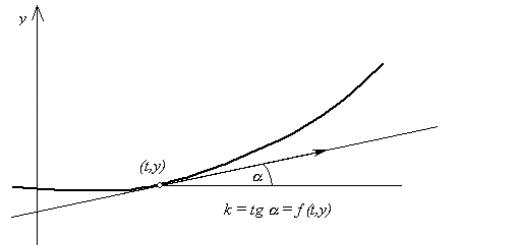
Углом между прямой и плоскостью будем называть угол, образованный прямой и её проекцией наплоскость. Пусть прямами плоскость заданы уравнениями
 Рассмотрим векторы и . Если угол между ними острый, то он будет , где φ – угол между прямой и плоскостью. Тогда
Рассмотрим векторы и . Если угол между ними острый, то он будет , где φ – угол между прямой и плоскостью. Тогда ![]() .
.
Если угол между векторами и тупой, то он равен . Следовательно ![]() . Поэтому в любом случае
. Поэтому в любом случае ![]() . Вспомнив формулу вычисления косинуса угла между векторами, получим
. Вспомнив формулу вычисления косинуса угла между векторами, получим  .
.
Условие перпендикулярности прямой и плоскости.
Прямая и плоскость перпендикулярны тогда и только тогда, когда направляющий вектор прямой и нормальный вектор плоскости коллинеарны, т.е. ![]() .
.
Условие параллельности прямой и плоскости. Прямая и плоскость параллельны тогда и только тогда, когда векторы и перпендикулярны.
Билет 7 . Дать определение эллипса. Записать уравнение эллипса в канонической форме. Вершины, фокусы, оси и эксцентриситет эллипса.
Определение: Эллипсом называется геометрическое место точек плоскости, для каждой из которых сумма расстояний до двух данных точек той же плоскости, называемых фокусами эллипса, есть величина постоянная.
Пусть F 1 и F 2 – фокусы эллипса. Начало O системы координат расположим на середине отрезка F 1 F 2 . Ось Ox направим вдоль этого отрезка, ось Oy – перпендикулярно к этому отрезку (рис.).

Определение: Точки пересечения эллипса с его осями симметрии называются вершинами эллипс а, центр симметрии – центром эллипса , отрезок между двумя вершинами, содержащий фокусы, называется большой осью эллипса , половина его длины – большой полуосью эллипса . Отрезок между вершинами на оси симметрии, не содержащей фокусов, называется малой осью эллипса , половина его длины – малой полуосью. Величина называется эксцентриситетом эллипса .
Если эллипс задан каноническими уравнениями, то его вершины имеют координаты (–a ;0), (a ;0),(0; –b ), (0;b ), большая полуось равна a , малая полуось равна b . Величина c , являющаяся половиной расстояния между фокусами, определяется из формулы c 2 = a 2 – b 2 .
Эксцентриситет эллипса характеризует степень вытянутости эллипса. Чем ближе эксцентриситет к нулю, тем больше эллипс похож на окружность. Чем ближе эксцентриситет к 1, тем сильнее вытянут эллипс. Отметим, что по определению для эллипса 0< <1.
Уравнение называется каноническим уравнением эллипса .

Билет 8 Дать определение гиперболы. Записать уравнение гиперболы в канонической форме. Вершины, фокусы, оси, асимптоты и эксцентриситет гиперболы,
Определение: Гиперболой называется геометрическое место точек плоскости, для каждой из которых абсолютная величина разности расстояний до двух фиксированных точек той же плоскости, называемых фокусами гиперболы, есть величина постоянная.
Так же, как и в случае эллипса, для получения уравнения гиперболы выберем подходящую систему координат. Начало координат расположим на середине отрезка между фокусами, ось Ox направим вдоль этого отрезка, а ось ординат – перпендикулярно к нему.
Уравнение называется каноническим уравнением гиперболы.
Гипербола обладает двумя взаимно перпендикулярными осями симметрии, на одной из которых лежат фокусы гиперболы, и центром симметрии. Если гипербола задана каноническим уравнением, то ее осями симметрии служат координатные оси Ox и Oy , а начало координат – центр симметрии гиперболы.
Определение: Точки пересечения гиперболы, заданной каноническим уравнением с осью Ox называются вершинами гиперболы , отрезок между ними называется действительной осью гиперболы . Отрезок оси ординат между точками (0;–b ) и (0;b ) называется мнимой осью. Числа a и b называются соответственно действительной и мнимой полуосями гиперболы. Начало координат называется ее центром. Величина называется эксцентриситетом гиперболы.
Замечание: Из равенства b 2 = c 2 – a 2 следует, что c >a , то есть у гиперболы >1. Эксцентриситет характеризует угол между асимптотами, чем ближе к 1, тем меньше этот угол.

Билет 9. Дать определение параболы. Записать уравнение параболы в канонической форме. Директриса, фокус параболы
Параболой называется геометрическое место точек плоскости, равноудаленных от заданной точки F и заданной прямой d, не проходящей через заданную точку. Это геометрическое определение выражает директориальное свойство параболы .
Директориальное свойство параболы Точка F называется фокусом параболы, прямая d - директрисой параболы, середина O перпендикуляра, опущенного из фокуса на директрису, - вершиной параболы, расстояние p от фокуса до директрисы - параметром параболы, а расстояние p2 от вершины параболы до её фокуса - фокусным расстоянием (рис,а). Прямая, перпендикулярная директрисе и проходящая через фокус, называется осью параболы (фокальной осью параболы). Отрезок FM , соединяющий произвольную точку M параболы с её фокусом, называется фокальным радиусом точки M. Отрезок, соединяющий две точки параболы, называется хордой параболы.
Для произвольной точки параболы отношение расстояния до фокуса к расстоянию до директрисы равно единице. Сравнивая директориальные свойства эллипса, гиперболы и параболы, заключаем, что эксцентриситет параболы по определению равен единице
.Геометрическое определение параболы , выражающее её директориальное свойство, эквивалентно её аналитическому определению - линии, задаваемой каноническим уравнением параболы:

Билет 10 . Что такое квадратная, единичная, симметрическая, ортогональная матрица. Дать определение транспонированной и обратной матрицы.
Определение 1. Матрицей называется прямоугольная таблица из чисел, содержащая - строк и - столбцов. .
Определение 2. Числа И называются Порядками матрицы (или говорят, что матрица имеет размер )
Определение 3. Числа , входящие в состав данной матрицы, называются ее элементами .
1.Определение 4. Матрица называется Квадратной если число строк равно числу столбцов. В случае квадратной матрицы вводятся понятия Главной диагонали (это числа - ) и Побочной диагонали (это числа - ).
2.Симметричной (Симметрической) называют квадратную матрицу, элементы которой симметричны относительно главной диагонали. Более формально, симметричной называют такую матрицу , что .
Это означает, что она равна её транспонированной матрице:
3. Единичной матрицей называется диагональная матрица, у которой все диагональные элементы равны единице. Например, единичной матрицей третьего порядка является матрица

Ортогональная матрица
Квадратная матрица A , для которой A -1 = A T называется ортогональной матрицей . Основные свойства ортогональной матрицы: Модуль определителя ортогональной матрицы равен единице. Это свойство следует из свойств определителей:
Сумма квадратов элементов любого столбца ортогональной матрицы равна единице.
Скалярное произведение строки на саму себя равно 1, а на любую другую строку - 0. Так же и для столбцов.
Сумма произведений элементов любой строки ортогональной матрицы на соответствующие элементы другой строки равна нулю.
Обратной матрицей
называется матрица, которая при умножении как справа, так и слева на данную матрицу дает единичную матрицу.Обозначим обратную матрицу к матрице А
через , тогда согласно определению получим: ![]() где Е
– единичная матрица.
где Е
– единичная матрица.
Обратная матрица существует не для всех матриц. Необходимым и достаточным условием невырожденности является
det(A ) ≠ 0 или rank(A ) = N .
Свойства обратной матриц
· , где обозначает определитель.
· для любых двух обратимых матриц и .
· , где обозначает транспонированную матрицу.
· для любого коэффициента .
· Если необходимо решить систему линейных уравнений , (b - ненулевой вектор) где - искомый вектор, и если существует, то . В противном случае либо размерность пространства решений больше нуля, либо их нет вовсе.
Транспонированная матрица - матрица , полученная из исходной матрицы заменой строк на столбцы.
Формально, транспонированная матрица для матрицы размеров - матрица размеров , определённая как .
Билет 11. Что такое эквивалентные матрицы. Перечислите элементарные преобразования матриц. Что можно сказать о рангах эквивалентных матриц.
Определение. Матрицы, полученные в результате элементарного преобразования, называются эквивалентными.
Элементарными преобразованиями над строками матриц называются следующие преобразования строк:
1. умножение строки на ненулевое число;
2. перестановка двух строк;
3. прибавление к одной строке матрицы другой ее строки, умноженной на некоторое ненулевое число.
4. Если от матрицы к матрице перешли с помощью эквивалентных преобразований над строками, то такие матрицы называются эквивалентными и обозначают .
5. Метод элементарных преобразований
6. Ранг матрицы равен числу ненулевых строк в матрице после приведения её к ступенчатой форме при помощи элементарных преобразований над строками матрицы.
Билет 12 , Что такое базисный минор. Сформулируйте теорему о базисном миноре.
Определение.
Ранг матрицы А - максимальный порядок неравного нулю минора (минор - определитель квадратной матрицы ![]() ). Обозначается .
). Обозначается .
Определение. Минор, определяющий ранг матрицы, называется Базисным минором. Строки и столбцы, формирующие БМ, называются базисными строками и столбцами.
Определение.
Система столбцов ![]() называется линейно зависимой числа , не все равные нулю и такие что:
называется линейно зависимой числа , не все равные нулю и такие что:
Теорема о Базисном миноре
Столбцы матрицы , входящие в базисный минор, образуют линейно независимую систему. Любой столбец матрицы линейно выражается через остальные столбцы из базисного минора.
В матрице размеров минор -го порядка называется базисным, если он отличен от нуля, а все миноры -ro порядка равны нулю или их вообще не существует.
Следствие. Если все столбцы матрицы линейно выражаются через столбцов , которые образуютлинейно независимую систему, то ранг матрицы .
Билет 13 Что такое однородная и неоднородная система уравнений. Что называется решением системы уравнений. Поясните термины: совместная система уравнений, несовместная система уравнений. Какие системы уравнений называются эквивалентными?
Определение 1. Если все свободные члены равны нулю, то система называется однородной, и неоднородной - в противном случае.
Определение 2. Решением системы называется совокупность из n чисел с 1 , с 2 , …, с n , при подстановке которой в систему вместо неизвестных будет получено m числовых тождеств.
Определение 3. Система называется совместной (несовместной), если она имеет хотя бы одно решение (не имеет решений).
Определение 4. Совместная система линейных алгебраических уравнений называется определённой (неопределённой), если она имеет единственное решение (множество решений).
Определение.
Две системы линейных уравнений называют равносильными (эквивалентными ), если они имеют одни и те же решения.
Эквивалентные системы получаются, в частности, при элементарных преобразованиях системы при условии, что преобразования выполняются только над строками системы.
Билет 14 Что такое фундаментальная система решений однородной системы уравнений. Что называется общим решением однородной системы уравнений.
Определение. Базис пространства решений системы линейных однородных уравнений называется её фундаментальной системой решений.
Теорема о структуре общего решения однородной системы уравнений:
Любое решение однородной системы линейных уравнений определяется формулой
где X 1 , X 2 , … , X n − r - фундаментальная система решений однородной системы линейных уравнений и C 1 , C 2 , … , C n − r - произвольные постоянные.
Свойства общего решения однородной системы уравнений :
1. При любых значениях C 1 , C 2 , … , C n − r X , определяемое формулой (3), является решением системы (1).
2. Каково бы ни было решение X 0 , существуют числа C 1 0 , … , C n − r 0 такие, что
Вывод:
Чтобы найти фундаментальную систему и общее решение однородной системы, нужно найти базис ядра соответствующего линейного оператора.
Билет 16 . Дать определение линейного пространства и сформулировать его свойства.
Множество L называется линейным или векторным пространством , если для всех элементов (векторов) этого множества определены операции сложения и умножения на число и справедливо:
1. Каждой паре элементов x и y из L отвечает элемент x + y из L , называемый суммой x и y , причём:
x + y = y + x − сложение коммутативно;
x + (y + z) = (x + y) + z − сложение ассоциативно;
x +0 = x − существует единственный нулевой элемент 0 (x +0 = x для любого x из L );
x + (− x )= 0 − для каждого элемента x из L существует единственный противоположный элемент −x (x + (−x) = 0 для любого x изL ) .
2. Каждой паре x и α, где α − число, а x элемент из L , отвечает элемент α·x , наываемый произведением α и x , причём:
α·(β· x ) = (α·β)· x − умножнение на число ассоциативно: ;
1· x = x − для любого элемента x из L .
3. Операции сложения и умножения на число связаны соотношениями:
α·(x + y ) = α·x + α·y − умножнение на число дистрибутивно относительно сложения элементов;
(α + β)· x = α·x + β· x − умножнение на вектор дистрибутивно относительно сложения чисел.
Билет 17 . Подпространство линейного пространства. Его свойства. Линейная оболочка.
Определение линейного подпространства
Непустое подмножество L линейного пространства V называется линейным подпространством пространства V, если
1) u+v∈L ∀u,v∈L (подпространство замкнуто по отношению к операции сложения);
2) λv∈L ∀v∈L и любого числа λ (подпространство замкнуто по отношению к операции умножения вектора на число).
Свойство 1 Всякое подпространство линейного пространства R есть линейное пространство.
Свойство 2 dim M ≤ dim Rn.
Свойство 3 (о пополнении базиса) . Если (ep)k - базис в подпространстве M линейного пространства Rn, причем k < n, то можно так выбрать элементы в Rn ek+1, ek+2, . . . , en, что (ep)n будет базисом в Rn.
О п р е д е л е н и е.Линейная оболочка - это набор векторов, которые задают линейное подпространство. Строго говоря, линейная оболочка - это множество всех линейных комбинаций данных векторов. Так же обозначим особенности:
Билет 18 . Дать определение евклидова пространства. Поясните операцию нормирование вектора.
Определение Пусть V - векторное пространство. Говорят, что в V задано скалярное произведение, если любым двум векторам x, y ∈ V поставлено в соответствие действительное число, называемое скалярным произведением этих векторов и обозначаемое через xy или (x, y), так, что выполнены следующие условия (здесь x, y, z - произвольные векторы из V, а
t - произвольное действительное число):
1) xy = yx (скалярное произведение коммутативно);
2) (tx)y = t(xy);
3) (x + y)z = xz + yz (скалярное произведение дистрибутивно относительно сложения);
4) xx >=0, причем xx = 0 тогда и только тогда, когда x = 0.
Векторное пространство, в котором задано скалярное произведение, называется евклидовым. Свойства 1)–4) называются аксиомами евклидова пространства.
Вектор называют нормированным или единичным
, если его длина равна единице. Нормировать произвольный ненулевой вектор - это поделить его на длину. Получится единичный вектор, сонаправленный исходному.
Скалярное произведение произвольного вектора на единичный даст точную длину проекции этого вектора на направление единичного. Чтобы получить не просто длину, а сам вектор-проекцию, надо умножить эту длину на наш единичный вектор:
Билет 19 Что такое ортонормированный базис. Поясните процесс ортогонализации Грама-Шмидта на примере двумерного базиса.
Ортонормированная система, состоящая из n векторов n -мерного евклидова пространства, образует базис этого пространства. Такой базис называется ортонормированным базисом.
Если e 1 , e 2 , ..., e n - ортонормированный базис n -мерного евклидова пространства и
x = x 1 e 1 + x 2 e 2 + ... + x n e n - разложение вектора x по этому базису, то координаты x i вектора x в ортонормированном базисе вычисляются по формулам x i =(x, e i ), i = 1, 2, ..., n .
ГРАМА-ШМИДТА, Дана линейно независимая система векторов b 1 , b 2 , …, b l , a l+1 , …, a n l ≥ 1 (1)часть, которой ортогональна, обозначим b l+1 ортогональную составляющую вектора а l+1 относительно ортогональной системыb 1 , b 2 , …, b l . Тогда1. Система векторовb 1 , b 2 , …, b l , b l+1 , a l+2 , …, a n (2) эквивалентна (1).
2. Система векторов (2) линейно независима, а ее часть b 1 , b 2 , …, b l , b l+1 – ортогональна.Используя, понятие ортогональной составляющей, опишем процесс превращения линейно независимой системы а 1 , а 2 , …, а n в ортогональную системуb 1 , b 2 , …, b n ненулевых векторов, который называется ортогонализацией системы а 1 , а 2 , …, а n .Этот процесс состоит из n–шагов, n–число векторов в исходной системе а 1 , а 2 , …, а n .
1 шаг. Полагаем b 1 =а 1 и получаем системуb 1 , а 2 , …, а n
2 шаг. Заменим в системе (3) вектор а 2 ортогональной составляющей относительно b 1 , и получим систему:b 1 ,b 2 , а 3 ,…,а n (4)
Согласно шагам ортогонализации система (4) линейно независима, а ее часть b 1 , b 2 –ортогональна.
Предположим, что уже построена линейно независимая система b 1 , b 2 , …, b k-1 , a k ,…, a n , (5)
у которой b 1 , b 2 , …, b k-1 – ортогональны.
На k-том шаге k = 3, n заменим в системе (5) векторa k его ортогональной составляющей относительно системы b 1 , b 2 , …, b k-1 и получим системуb 1 , …,b k , a k+1 , …, a n .
После выполнения n–го шага получим линейно независимую и ортогональную систему векторов b 1 , b 2 , …, b n .
Билет 20 .Дать определение оператора в линейном пространстве. Какой оператор называется линейным.
Оператором называется правило, по которому каждому элементу x X ставится в соответствие единственный элемент y некоторого непустого множества Y . Говорят, что оператор действует из X в Y .
Действие оператора обозначают y = A (x ), y - образ x , x - прообраз y .
Если каждый элемнт y из Y имеет единственный прообраз x из X , y = A (x ), оператор называют взаимно однозначным отображением X в Y или преобразованием X , X - область определения оператора.
Пусть X и Y два линейные пространства. Оператор A , действующий из X в Y , называется линейным оператором , если для любых двух элементовu и v из X и любого числа α справедливо:
A (u + v ) = A (u ) + A (v ) , A (α·u ) = α· A (u ).
Билет 21. Приведите пример линейного оператора. Какие действия над линейными операторами Вы знаете?